���@���� �`/�c�R���o�[�^�̓Ǎ���
 �@�@
�@�@
PIC16�A18�AdsPIC�V���[�Y�ł͂W�`12�r�b�g�̓����`�^�c�R���o�[�^����������Ă���o�h�b������܂��B
�@���@CCS�R���p�C��
�@�@�@�@�@CCS�R���p�C���ł͂�A/D�R���o�[�^�Ǎ��݂Ɋւ��Ĉȉ��̂S�̗���Љ�܂��B
�@�@�@�@�@�i�P�j�@�W�r�b�g�`/�c�R���o�[�^�o�͂��W�̂k�d�c�ŕ\��
�@�@�@�@�@�i�Q�j�@�W�r�b�g�`/�c�R���o�[�^�o�͂��t���ɕ\��
�@�@�@�@�@�i�R�j�@��d���ɂ�鐳�m��10�r�b�g�`/�c�ϊ�
�@�@�@�@�@�i�S�j�@AD�ϊ����Q�g�p����������\10�r�b�gA/�c�ϊ�
�@���@C18�R���p�C��
�@�@�@�@�@�i�P�j�@���͓d�����t���ɕ\���iPIC18F4550�j
�@�@�@�@�@�i�Q�j�@���͓d�����t���ɕ\���iPIC18F452�j
�@���@C30�R���p�C���@dsPIC��
�@�@�@�@�@�i�P�j�@���͓d�����t���ɕ\���i����PIC30F2012�j
�@�@�@�@�@�i�Q�j�@���͓d�����t���ɕ\���i����PIC30F4013�j
�@���@C30�R���p�C���@�@PIC24��
�@�@�@�@���͓d�����t���ɕ\���iPIC24FJ64GA002�j
�@���@C32�R���p�C���@PIC32MX��
�@�@�@���͓d�����t���ɕ\���iPIC32MX460F512L�j
�@���@CCS�R���p�C��
�@�@A/D�R���o�[�^�̓ǂݍ��ݕ��͂��ׂē����ňȉ��̂悤�ɂȂ�܂��B(�ڍ� �R���p�C���̃w���v�Q�Ɓj
�@
�L��
���� |
�\�[�X�R�[�h�ւ̋L�ڗv�� |
�� |
| 1. |
�v���v���Z�b�T�ɂ����Ďg�p����o�h�b�̃w�b�_�[�t�@�C�����C���N���[�h���܂�.
�������Ƃ̍s�ɂ`/�c�R���o�[�^�̕���\�Ɋւ���L�ڂ������Ȃ܂� |
#include <pic16f877.h>
#device ADC=10 |
| 2. |
�g�p����N���b�N���g���Ɋւ���L�ڂ������Ȃ� |
#use delay(clock=20000000) |
| 3. |
A/D�ϊ������l���i�[����ϐ���ݒ肵�܂�
�W�r�b�g��A/D�̏ꍇ��unsigned int�^���A10�`12�r�b�g��A/D�̏ꍇ�́@long int�^�܂���unsigned long int�^�̐�����ݒ肵�܂��B |
unsigned int Advalue; |
| 4. |
A/D�ϊ��ɊW����|�[�g���A�i���O�|�[�g�Ƃ��Ďg�p����̂��A�f�W�^���|�[�g�Ƃ��Ďg�p����̂��A�܂��`/�c�ϊ�����ۂ̊�d���[�q�Ƃ��Ďg�p���邩�Ƃ������ݒ�������Ȃ��܂��B |
setup_adc__ports( ALL_ANALOG ); |
| 5. |
PIC�̓����`/�c�R���o�[�^�͒�����r�^�ł��B�ϊ��ɍۂ��g�p����N���b�N�Ƃ��ĉ��������̂��� main���̂͂��߂Őݒ肵�܂��B�@�ʏ�͓����N���b�N�������܂��B�@ |
setup_adc(ADC_CLOCK_INTERNAL); |
| 6. |
�ǂ̃|�[�g�̃A�i���O�l��ǂނ̂��w�肵�܂��BPIC�͕�����A/D�ϊ����ł���|�[�g�������Ă��܂����A������r���W�X�^�AD/A�ϊ���A�y�� �����̐��䕔���P���������Ă����Ȃ��̂Ő�ւ��Ďg���܂��B�����ɂ͓ǂݍ��߂܂���B |
set_adc_channel(2); |
| 7. |
�`�����l�����ւ�����AA/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@ |
delay_us(50); |
| 8.�@ |
A/D�ϊ����ꂽ�l��ǂݍ��݁A�ϐ��ɃZ�b�g���܂��B�@ read_adc();�̖߂�l�ɂ��ăR���p�C���̃��t�@�����X�}�j���A���ɂ�
�@Returns�F�@Either a 8 or 16 bit int depending on #DEVICE ADC= directive.
�Ƃ���܂��B�@���ۂɊϑ����Ă݂�Ɩ߂��Ă���͕̂����Ȃ������ł��B�߂�l�̕ϐ��̌^�͕����Ȃ��̐����ɂ���悤�ɂ��܂��傤�B�@10�r�b�gAD�ϊ��̎��͕ϐ��̌^��long int�@�i16�r�b�g�j�ɂ���̂Ő����ł������Ȃ������ł����͔������܂���B�������A8�r�b�gAD�ϊ��̎��ϐ��̌^��int�^�i8�r�b�g�j�ɂ���Ɗ�d����1/2�ȏ�̒l�ɑ��߂�l�͕��ƂȂ��Ă��܂��܂��B�i�Q�j�W�r�b�gA/D�R���o�[�^�o�͂��t���ɕ\���@���Q�Ƃ��ĉ������B�@ |
Advalue = read_adc();�@ |
�@�@�@�@�@
�ȉ��̃v���O������̒��ɂ���t���\���퐧�䃉�C�u�����@1llcd_lib.c�́@��ՓN�炳�����v���ꂽ���̂ł��B
�i�P�j�@�W�r�b�g�`/�c�R���o�[�^�o�͂��W�̂k�d�c�ŕ\��
�@�@������i�d�l��
�@�@�@�E�@�ϒ�R��łO�`�TV�̓d��������A�|�[�gAN0�ɓ��͂��邱��
�@�@�@�E�@AN0�ɓ��͂��ꂽ�d����PIC�̓d���d���{�TV���r��d���Ƃ��ĂW�r�b�g��A/D�R���o�[�^�œǂݍ��ނ���
�@�@�@�E�@A/D�ϊ����ꂽ�W�r�b�g�l���@LSB�i��O�ʃr�b�g�j��RB0�A��P�ʃr�b�g��RB1�A�c�c�@MSB(��V�ʃr�b�g�j��RB7�A
�@�@�@�@�@�ƂȂ�悤�ɑΉ������AA/D�R���o�[�^�̒l�ɂ���������LED��_�ł����邱��
�@�@�@�E�@���͓d�����OV�̎�LED�͂��ׂ�OFF�A�TV�̎��͂��ׂē_�������邱�Ɓ@
�@�@�@
�@�@������i��H�}��
�@�@�@�@PIC�P�UF�W�V�V���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j
 �@
�@
�@�@������i�O�ρ�
�@�@�@�@�@
 �@�@�@�@�@�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
-----------------------------------------------------------------------------------------
PIC16F877
�@����AD�R���o�[�^���W�r�b�g�̕���\�Ŏg���ăA�i���O�d����ǂݍ��ݒl���W��LED�ŕ\������
-------------------------------------------------------------------------------------------
*/
#include "16f877.h"
#device ADC=8 //�@�P�O�r�b�g�ɂ��Ȃ�AD�R���o�[�^�ł͂��邪�@�W�r�b�g��AD�R���o�[�^�ɃZ�b�g
#use delay(clock=20000000)
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#byte port_b=6 //B�|�[�g���W�X�^�i�U�Ԓn�j���@�ϐ�port_b�ɑΉ�������
main(){
unsigned int unsignedintX;
set_tris_b(0); //B�|�[�g�̒[�q�����ׂďo�̓��[�h "0"�@�ɐݒ�
setup_adc_ports(ALL_ANALOG); //AN0�`AN7���ׂĂ�A/D�ϊ����̓|�[�g�ɐݒ�
setup_adc(ADC_CLOCK_INTERNAL); //�����ϊ����Ĕ�r���鎞�A�����N���b�N���g�p����
while(1)
{
set_adc_channel(0); // �`�����l��AN0��AD�R���o�[�^�ϊ��J�n
delay_us(50); //A/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@
unsignedintX = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����Ȃ������̕ϐ��ɃZ�b�g���܂�
port_b = ~(unsignedintX); //B�|�[�g��AD�ϊ����ꂽ�f�W�^���l�]���ďo�͂���
}
return 0;
}
�@
�i�Q�j�@�W�r�b�g�`/�c�R���o�[�^�o�͂��t���ɕ\��
�@�@�@AD�ϊ����ꂽ�l�𐮐��ł�݂Ƃ�Ɣ�r�d���̂P/�Q���傫���d���ɑ��Ă͒l�����ɂȂ�Ɠ����ɓd�����傫��
�@�@�Ȃ�ɂ��������Ēl�̐�Βl���������Ă����܂��B
�@�@�@�@���͓d���@�@�@�@�@�@�@�@�@�@�@���@�@�@�@�@�@�@�@�@ �@�@ 1/2�@�@�@�@�@�@�@�@�@�@�@
�@ �@�@��
�@�@�@�@�@�����@�@�@�@�@�@�@�@�@0 1 2�@�c�c�@�@125 126
127 -128 -127 -126 -125 �c�c
-3 -2 -1
�@�@�@�@�����Ȃ����� 0 1 2
�c�c 125 126 127 128
129 130 131
253 254 255
�@�@�@�@���̖��͂W�r�b�gA/D�ϊ��̎��ϐ���int�^�i8�r�b�g�j�ɂ����ꍇ�ɔ������܂��B�@read_adc();�̖߂�l�͕���
�@�@�@�Ȃ��̐����Ȃ̂ŕϐ��͕����Ȃ��̐����ɂ��������悢�Ǝv���܂��B�@���A�ϐ��̌^���@long�@int�^�i16�r�b�g�j��
�@�@�@���Ă����Δ�r�d����1/2�ȏ�ŕ��ɂȂ邱�̃g���u����A/D��10�r�b�g�ϊ��̏ꍇ���܂ߔ������܂���
�@�@�@
�@�@������i�d�l��
�@�@�@�E�@�ϒ�R��łO�`�TV�̓d��������A�|�[�gAN0�ɓ��͂��邱��
�@�@�@�E�@AN0�ɓ��͂��ꂽ�d����PIC�̓d���d���{�TV���r��d���Ƃ��ĂW�r�b�g��A/D�R���o�[�^�œǂݍ��ނ���
�@�@�@�E�@A/D�ϊ����ꂽ�l���i�����t�j�����Ŏ��t���̂P�s�ڂɁi�����t�j�����ŕ\�����邱�ƁB
�@�@�@�E�@A/D�ϊ����ꂽ�l���Ȃ������Ŏ��t���̂Q�s�ڂɕ����Ȃ������Ƃ��ĕ\�����邱��
�@�@�@�E�@A/D�ϊ����ꂽ�W�r�b�g�l���@LSB�i��O�ʃr�b�g�j��RB0�A��P�ʃr�b�g��RB1�A�c�c�@MSB(��V�ʃr�b�g�j��RB7�A
�@�@�@�@�@�ƂȂ�悤�ɑΉ������AA/D�R���o�[�^�̒l�ɂ���������LED��_�ł����邱��
�@�@�@�E�@���͓d�����OV�̎�LED�͂��ׂ�OFF�A�TV�̎��͂��ׂē_�������邱�Ɓ@
�@�@
�@�@������i��H�}��
�@�@�@�@PIC�P�UF�W�V�V���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j
�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
------------------------------------------------------------------
PIC16F877
AD�R���o�[�^�̒l�𐮐��ƕ����Ȃ������̗����ŌĂ�ʼnt���ɔ�r�\������
�@����AD�R���o�[�^���W�r�b�g�̕���\�Ŏg���ăA�i���O�d����ǂݍ��ݒl���W��LED�ŕ\������
--------------------------------------------------------------------
*/
#include "16f877.h"
#device ADC=8
#use delay(clock=20000000)
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#byte port_b=6 //B�|�[�g���W�X�^�i�U�Ԓn�j���@�ϐ�port_b�ɑΉ�������
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
main(){
int intX;
unsigned int unsignedintX;
set_tris_b(0);
setup_adc_ports(ALL_ANALOG); //AN0�`AN7���ׂĂ�A/D�ϊ����̓|�[�g�ɐݒ�
setup_adc(ADC_CLOCK_INTERNAL); //�����ϊ����Ĕ�r���鎞�A�����N���b�N���g�p����
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
delay_ms(2000);
lcd_clear();
while(1)
{
set_adc_channel(0); // �`�����l��AN0��AD�R���o�[�^�ϊ��J�n
delay_us(50); //A/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@
intX = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����̕ϐ��ɃZ�b�g���܂�
unsignedintX = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����Ȃ������̕ϐ��ɃZ�b�g���܂�
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"intX=%d",intX);//�ǂݍ��l��
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"unsignedintX=%u",unsignedintX);
port_b = ~(unsignedintX); //B�|�[�g��AD�ϊ����ꂽ�f�W�^���l���o�͂���
delay_ms(300);
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�����쌋�ʁ�
���͓d����2.5V�ȉ��̏ꍇ
�@�@�����@�Ɓ@�����Ȃ������͓����l�ƂȂ� |
|
���͓d����2.5���ȏ�̏ꍇ
�@�@�����ƕ����Ȃ������͈قȂ�l�ƂȂ� |
 |
|
 |
�i�R�j�@��d���ɂ�鐳�m��10�r�b�g�`/�c�ϊ��@�@
�@�@������i�d�l��
�@�@�@�E�@�ϒ�R��łO�`�TV�̓d��������A�|�[�gAN0�ɓ��͂��邱��
�@�@�@�E�@AN0�ɓ��͂��ꂽ�d����d���ϓ��A���x�ϓ��̏��Ȃ���r��d�����������ĂP�O�r�b�g��A/D�R���o�[�^��
�@�@�@�@�@�ǂݍ��ނ���
�@�@�@�E�@A/D�ϊ����ꂽ�f�W�^���ϊ��l���t���̂P�s�ڂɂP�O�i���ŕ\�����邱�ƁB
�@�@�@�E�@�܂��t���̂Q�s�ڂɂ͓��͂��ꂽ�d�����@�P�ʁ@V�@�ŕ\�����邱��
�@�@������i��H�}���@�@�i����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�UF�W�V�V���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B ���肵����d���f�q�Ƃ��ăi�V���[�~��LM385��
�@�@�@����������ȉ��Ɏ����܂��B���}�̏ꍇRA3�ɓ��͂�����d���̓f�[�^�V�[�g�ɂ���v�Z�����
�@�@�@�@�@Vref = 1.24 �~�iR3/R2 + 1) = 1.24 �~ ( 220k��/100K�� + 1 )
= 3.968 V
�ƂȂ�܂��B
�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
------------------------------------------------------------------
PIC16F877
AD�R���o�[�^�̒l���Ȃ������œǂݍ���Ł@10�r�b�g�l�Ɠd���l���t���ɔ�r�\������
�@��d����LM385�ň��艻���ꂽ3.968V���g�p����
--------------------------------------------------------------------
*/
#include "16f877.h"
#device ADC=10
#use delay(clock=20000000)
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#byte port_b=6 //B�|�[�g���W�X�^�i�U�Ԓn�j���@�ϐ�port_b�ɑΉ�������
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
main(){
unsigned long int adValue;
set_tris_b(0);
setup_adc_ports(AN0_AN1_VSS_VREF); //AN0 AN1��AN3�ɓ��͂����d�������A/D�ϊ��|�[�g�ɐݒ�
setup_adc(ADC_CLOCK_INTERNAL); //�����ϊ����Ĕ�r���鎞�A�����N���b�N���g�p����
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
delay_ms(2000);
lcd_clear();
while(1)
{
set_adc_channel(0); // �`�����l��AN0��AD�R���o�[�^�ϊ��J�n
delay_us(50); //A/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@
adValue = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����Ȃ������̕ϐ��ɃZ�b�g���܂�
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"adValue=%lu",adValue);//�ǂݍ��l��
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"Vin=%4.3f V",3.968*((float)AdValue/1023)); //10�r�b�g�l��d���l�Ɋ��Z
delay_ms(300);
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�����쌋�ʁ�

�@C18�ҁ@�@�O�����t�@�����X�ɂ��AD�ϊ�
������i��H�}��PIC�P�WF87K90���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
AD �R���o�[�^�@�P�Q�r�b�gAD�@
PC18F87K90
*/
#include <p18f87K90.h>
#include <stdio.h>
#include <delays.h>
#include <timers.h>
#include <adc.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config FOSC = XT //FOSC = HS //�@�V�X�e���N���b�N��1MH��
#pragma config XINST = OFF
#pragma config WDTEN = OFF //�E�H�b�h�b�N�^�C�}�@OFF
unsigned int Count_10msec;
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
long int ADread;
char str[17];
char str2[30];
float Vin,Vin1000;
long int Vin1000i;
int Vi,Vf;
void delay_ms (long int cycle) //�@CCS�R���p�C���Ɠ����@delay_ms(long int) ����v
{
long int i = 0;
for (i = 0; i < cycle; i++)Delay10TCYx(25); // 25 x 40��sec = 1000��sec // Delay10TCY():40��sec
}
void lcd_printf(char* str) //�t���\���⏕��
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
}
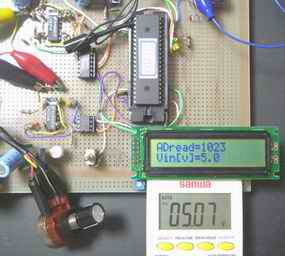
void Ad_Func() //AD�ϊ��Ǎ��݁@���@�\��
{
SetChanADC(ADC_CH0); //�`�����l�����ւ���ꍇ
ConvertADC();
while( BusyADC()); //AD�ϊ����I���܂ő҂�
ADread = ReadADC(); //AD�ϊ��l�Ǎ���
//�t���֕\��
lcd_clear();
sprintf(str,"ADread=%ld",ADread);
lcd_printf(&str[0]);// AD�ϊ��Ǎ��ݒl���t���ɂP�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Vin = (float)ADread/4095*5.0;
Vi = (int)Vin;
Vf =(int)( (Vin - (int)Vin)*100);
sprintf(&str2[0],"Vin[v]=%d.%d",Vi,Vf); // %f�i���������j�͖��T�|�[�g
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
lcd_printf(&str2[0]);// AD�ϊ��Ǎ��ݒl���t����2�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
}
#pragma interrupt my_Func // 10msec �^�C�}1�@�C���^�[�o�����荞��
#pragma code isrcode = 0x08
void isr_direct(void)
{ _asm goto my_Func _endasm }
#pragma code
void my_Func(void)
{
LATJbits.LATJ0 = 0;
PIR1bits.TMR1IF = 0; // �^�C�}1���荞�݃t���O���N���A����
WriteTimer1(15536); // 1��sec �~�@4�@�~�@1�@�~�@50000�@���@200000��sec�@=�@200msec �iat �V�X�e���N���b�N1MH���j
// 256�~256�@-�@50000�@=�@15536
Ad_Func();
LATJbits.LATJ0 = 1;
}
void main (void)
{
unsigned char channel=0x00,config1=0x00,config2=0x00,config3=0x00,portconfig=0x00;
TRISD = 0;
TRISJ = 0;
TRISAbits.TRISA0 = 1;
TRISAbits.TRISA2 = 1;
TRISAbits.TRISA3 = 1;
ANCON0 = 0b00001101; //RA0
ANCON1 = 0;
ANCON2 = 0;
config1 = //ADCON0: A/D CONTROL REGISTER 0
ADC_CH0 | //AD�ϊ�����̃`�����l���I���iPIC18F�͓����ɕ�����AD�ϊ��͂ł��Ȃ��j
ADC_INT_OFF | //AD�ϊ��ł̊����ݎg�p�̗L��
ADC_REF_VDD_INT_VREF_2 |
// ADC_REF_VDD_VREFPLUS | //Vref+�̐ݒ�@�@�@�O���uref�d��
ADC_REF_VDD_VSS ; //Vref-�̐ݒ�@�@�@�o�h�b��0�u
//ADCON1: A/D CONTROL REGISTER 1
config2 = //ADCON2: A/D CONTROL REGISTER 2
ADC_FOSC_2 | //AD�ϊ��p�N���b�N�@�@�V�X�e���N���b�N��1/2�@
ADC_RIGHT_JUST | //�ϊ����ʂ̕ۑ����@�@���l�߁@
ADC_2_TAD ; //AD�ϊ��̃A�N�C�W�V�����^�C���I���@�ϊ��N���b�N���ԁi=1Tad�j�~2Tad
OpenADC(config1,config2,portconfig);
//ADCON1���W�X�^//�@�d���d�����t�@�����X�łȂ��ꍇ��ADCON1���W�X�^�̏������݂��K�v�ł���B�@C18�̃o�O�H
ADCON1bits.TRIGSEL1 = 0; //
ADCON1bits.TRIGSEL0 = 0;
ADCON1bits.VCFG1 = 0; //01: �O�����t�@�����X//�i�Q�l�F10: Vref = 2.048v�j
ADCON1bits.VCFG0 = 1;
ADCON1bits.VNCFG = 0; //Vref-: AVss //PIC��GND
//�@���������t�@�����X�@�y�ъO�����t�@�����X���Ɂ@Vref- ���OV�ɐڑ�����K�v�Ȃ�
//�@���������͂̏ꍇ�̂ݕK�v
//�@���d���d�������t�@�����X�d���ȉ��ɂȂ�Ɓ@�܂�������������AD�ϊ��l�ƂȂ�B�@
ADCON1bits.CHSN2 = 0; //Vref- �Ƃ���AVss �ƊO��Vref-��I�������ꍇ��000��I��
ADCON1bits.CHSN1 = 0;
ADCON1bits.CHSN0 = 0;
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"AD Converter !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start2 !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
while (1)
{
Ad_Func();
delay_ms(200);
}
}
//************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD3 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
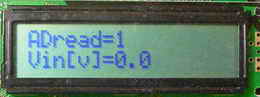
�@�����s���ʁ�
�@�E���t�@�����X�d�����d���d���ȉ��̏ꍇ�́@�Ó��Ȏ������ʂ�����ꂽ�B�@���Ȃ킿�@�d���d�������t�@�����X�d��2.4V�ȉ��ɂȂ�Ɓ@�܂�������������AD�ϊ��l�ƂȂ�
�@�E�O�����t�@�����X�d���ł�AD�ϊ��̏ꍇ�A�@Vref- �[�q�́@GND�ɐڑ�����K�v�͂Ȃ��B�@�\�t�g�ł̐ݒ肾���ł悢�B
�@�E���t�@�����X�d���̏o�Ͳ��߰��ݽ�͒Ⴍ�Ȃ���Ȃ�Ȃ��B
�@�E�d������[�q�ɒ��ڊ�d���f�qLM285-1.2���Ȃ��ł�AN�[�q�̓��Ͳ��߰��ݽ�������̂Ŋ�d���~���͓����Ȃ������B�@20K���̃_�~�[��R��ڑ������1.2���̓d���~���͓�����B
�@�EPIC�d�����ቺ�������̉t���i�{5.0V�j�Ƃ̐M���d�����x���ϊ����x���V�t�^�[�Ƃ��āA�@3.0���d����74HC4050�͗L���ł������B
| AD�ϊ��l |
���_�l |
| �푪��d���_PIC�d���d�� |
1.6v |
1.8v |
2.0v |
2.5v |
3.0v |
3.3v |
5.0v |
�@�@�@�@ |
| 0.5v |
3793 |
3860 |
3888 |
845 |
810 |
810 |
880 |
4095�@�~�@0.5/2.4�@���@853 |
| 1.0v |
3807 |
3883 |
3916 |
1653 |
1668 |
1681 |
1700 |
4095�@�~�@10/2.4�@���@1706 |
| 1.8v |
3825 |
3900 |
3944 |
2948 |
2971 |
2950 |
2953 |
4095�@�~�@1.8/2.4�@���@3071 |
(�S�j�@A/D�ϊ����Q�g�p����������\10�r�b�g�`/�c�ϊ�
�@�@������i�d�l��
�@�@�@�E�@�ϒ�R��łO�`�TV�̓d��������A�|�[�gAN0�ɓ��͂��邱��
�@�@�@�E�@����d���������Ȓl�ɂ����Ă��̑��ΓI��A/D�̕���\�����߂邱��
�@�@�@�E�@AN0�AAN1��A/D�ϊ����ꂽ�f�W�^���ϊ��l���t���̂P�s�ڂɂP�O�i���ŕ\�����邱�ƁB
�@�@�@�E�@�t���̂Q�s�ڂɂ́@AD�ϊ����ꂽ10�r�b�g�l�Ɠ��͂��ꂽ�d�����{���g�i�����_�ȉ��R���j�ŕ\�����邱��
�@�@������i��H�}���@�@�@�i����H�}��PDF�t�@�C���j
�@�@�@�@PIC�P�UF�W�V�V���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�P�d���œ����̂悢�I�y�A���vLM2904���������ĂP�O�{��
�@�@�@�A���v�����葪��d�������Ă��̏o�͂�AN�P�ɐڑ����܂����B�@LM2904���{�TV�̒P�d���Ŏg�p����ꍇ���j�A
�@�@�@���e�B���悢�̂͏o�͂�3.5V���x�܂łȂ̂Ł@�o�͓d���łO�`�Q�D�TV�͈̔͂�AN1���͓d�������p���邱�ƂƂ��܂����B
�@�@�@�������邱�Ƃő���d���̂O�`�O�D�Q�TV��������\��A/D�ϊ��ł��邱�ƂɂȂ�܂��B
�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
------------------------------------------------------------------
PIC16F877
�����Ȓl�̓A�i���O�A���v(�Q�C����10�{�j�ő�����AD�ϊ����Ă��
�@AD�R���o�[�^���Q�g�������ȓd�����o�̕���\��������
--------------------------------------------------------------------
*/
#include "16f877.h"
#device ADC=10
#use delay(clock=20000000)
#FUSES HS,NOWDT,NOPROTECT,PUT,BROWNOUT,NOLVP
#byte port_b=6 //B�|�[�g���W�X�^�i�U�Ԓn�j���@�ϐ�port_b�ɑΉ�������
#use fast_io(D)
//////// Port define and link LCD library
#define mode 0
// �t��
#define input_x input_D
#define output_x output_D
#define set_tris_x set_tris_D
#define rs PIN_D2 //chip select
#define stb PIN_D0 //strobe
#include <1lcd_lib.c>
main(){
unsigned long int A0,A1,AT;
set_tris_b(0);
setup_adc_ports(ALL_ANALOG); //AN0 AN1��AN3�ɓ��͂����d�������A/D�ϊ��|�[�g�ɐݒ�
setup_adc(ADC_CLOCK_INTERNAL); //�����ϊ����Ĕ�r���鎞�A�����N���b�N���g�p����
lcd_init();
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
printf(lcd_data,"start!!");
delay_ms(2000);
lcd_clear();
while(1)
{
set_adc_channel(0); // �`�����l��AN0��AD�R���o�[�^�ϊ��J�n
delay_us(50); //A/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@
A0 = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����Ȃ������̕ϐ��ɃZ�b�g���܂�
set_adc_channel(1); // �`�����l��AN1��AD�R���o�[�^�ϊ��J�n
delay_us(50); //A/D�ϊ����ꂽ�f�W�^���l���Z�b�g�����܂ł̎��ԁi�g�[�^���Z�g�����O���ԁj�{���̎��Ԃ����҂��܂��@
A1 = read_adc(); //A/D�ϊ����ꂽ�l��ǂݍ��݁A�����Ȃ������̕ϐ��ɃZ�b�g���܂�
lcd_clear();//�@�t���I�[���N���A
printf(lcd_data,"A0=%lu A1=%lu",A0,A1);//�ǂݍ��l��\��
if(A0>= 52)
{
AT = A0; //5���ȏ�Ȃ�A0����ǂݍ��l������ �@�@1023 �~�@0.05�@=�@51.15
//5V�~0.05�@���@0.25V�@�@�@�@�@0.25V�@�~�@10�i�����߃Q�C���j�@=�@2.5V
//�@2.5V�@�@���@�@3.5V�i���ߖO�a�d���j
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"AT=%lu V=%4.3f",AT,5*((float)AT/1023)); //10�r�b�g�l��d���l�Ɋ��Z
}
else
{
AT = A1;
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
printf(lcd_data,"AT=%lu V=%4.3fV",AT,5*((float)AT/1023/10)); //10�r�b�g�l��d���l�Ɋ��Z
}
delay_ms(300);
}
return 0;
}
//---------------------------------------------------------------------------
//**************************************
//�C���N���[�h�t�@�C�� 1lcd_lib.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽ���̂ł�
//**************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u����
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////// �f�[�^�o�̓T�u��
void lcd_out(int code, int flag)
{
output_x((code & 0xF0) | (input_x() & 0x0F));
if (flag == 0)
output_high(rs); //�\���f�[�^�̏ꍇ
else
output_low(rs); //�R�}���h�f�[�^�̏ꍇ
delay_cycles(4); //NOP 1
output_high(stb); //strobe out
delay_cycles(8); //NOP 2
output_low(stb); //reset strobe
}
//////// �P�����\����
void lcd_data(int asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
delay_us(50); //50��sec�҂�
}
/////// �R�}���h�o�͊�
void lcd_cmd(int cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
delay_ms(2); //2msec�҂�
}
/////// �S������
void lcd_clear()
{
lcd_cmd(0x01); //�������R�}���h�o��
delay_ms(15); //15msec�҂�
}
/////// ��������
void lcd_init()
{
set_tris_x(mode); //���[�h�Z�b�g
delay_ms(15);
lcd_out(0x30, 1); //8bit mode set
delay_ms(5);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x30, 1); //8bit mode set
delay_ms(1);
lcd_out(0x20, 1); //4bit mode set
delay_ms(1);
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x02); //cursor home
}
�@�����쌋�ʁ�
�@�@A0�i���P�W�j���A���v�i�Q�C���P�O�{�j���o�Ȃ��d�������A/D�ϊ��̂P�O�r�b�g�l�ŁAA1�i���P�V�T�j���A���v�i�Q�C���P�O�{�j��
�@�@�o����ɂ��A/D�ϊ��̂P�O�r�b�g�l�ł��B����\���P���������Ă��邱�Ƃ��킩��܂��B
�@�@�@�A�i���O�̃A���v��lj����ĂQ��A/D�R���o�[�^��A/D�ϊ��������Ȃ����Ƃ́A�����Ȓl�̑���l�ɑ��Ă����ΓI
�@�@���x��v�������ꍇ�ɗL���ȕ��@���Ǝv���܂��B12�r�b�g�A16�r�b�g��A/D�R���o�[�^���O�t�������PIC�Ƃ̃C���^�[
�@�@�t�F�[�X�A�����X�s�[�h�A�R�X�g�����낢��Ȗ�肪�������Ă��܂��B

���@C18�R���p�C��
�@�@C18�R���p�C���̏ꍇ�A����AD�R���o�[�^�����AD�ϊ��l��Ǎ��݂̊�{�I�ȗ���͈ȉ��̂悤�ɂȂ�܂��B
�@�@�@�@�@�@OpenADC() ���Ł@SFR�̐ݒ�������Ȃ��B�A���ꕔ��PIC�ł͒��ڂ̃��W�X�^�������݂��K�v�ƂȂ�B
�@�@�@�@�A�@SetChanADC�i�j���Ł@�ǂݍ��݂̃`�����l����I������B
�@�@�@�@�B�@ConvertADC()���Ł@�ǂݍ��݂��J�n����B
�@�@�@�@�C�@BusyADC()���Ł@AD�ϊ�����������̂�҂i�߂�l��"0"�ɂȂ�܂ő҂j
�@�@�@�@�D�@ReadADC()���Ł@AD�ϊ��l��ǂݍ���
�@�@�@�@�E�@CloseADC�i�j���Ł@AD�ϊ���Disable�ɂ���
�@�i�P�j���͓d�����t���ɕ\���iPIC18F4550�j
�@�@PIC18F4550�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B�@PIC�̎�ނɂ����
�@OpenADC()���̈����A�y�ш����̐����قȂ�܂��BPIC18F4550�̏ꍇ��SFR��ADCON0�AADCON1�AADCON2���W�X�^
�@���ׂĂ̐ݒ肪OpenADC()���̈����ł����Ȃ��܂��B
�@������i�d�l��
�@�@�E�@PIC�P�WF4550��AN0�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{�TV�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���200msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��
�@�@PIC�P�WF�S�T�T�O�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄
/*
�@�@C18�R���p�C��
�@�@�@�@�@PIC18F4550�@����AD�ϊ���H�Ǎ���
*/
#include <p18f4550.h>
#include <adc.h>
#include <delays.h>
#include <stdio.h>
#include <stdlib.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config PLLDIV = 5 //96MHz PLL Prescalar(1�A2�A3�A4�A5�A6�A10�A12�̂݁j :�@�O�����g����4MH��
//20MHz �� 5 = 4MHz �� 96MH���i=4MHz�~24 :�Œ�j
#pragma config USBDIV = 2 // Full Speed USB Clock Source Selection : 2(constant)
#pragma config CPUDIV = OSC1_PLL2 //CPU System Clock Postscaler
//�@PIC�̃V�X�e���N���b�N���g���F48MH���i=96MHz ��2�j
#pragma config FOSC = HS //�@�V�X�e���N���b�N��20MH��
//#pragma config FOSC = HSPLL_HS //�@�V�X�e���N���b�N��48MH��
#pragma config WDT = OFF
#pragma config LVP = OFF
void lcd_printf(char* str) //�t���\���⏕��
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
}
void Ad_Func() //AD�ϊ��Ǎ��݁@���@�\��
{
int ADread;
char str[17];
char str2[30];
float Vin,Vin1000;
long int Vin1000i;
int Vi,Vf;
// SetChanADC(ADC_CH1); //�`�����l�����ւ���ꍇ
ConvertADC();
while( BusyADC()); //AD�ϊ����I���܂ő҂�
ADread = ReadADC(); //AD�ϊ��l�Ǎ���
//�t���֕\��
lcd_clear();
sprintf(str,"ADread=%d",ADread);
lcd_printf(&str[0]);// AD�ϊ��Ǎ��ݒl���t���ɂP�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Vin = (float)ADread/1023*5;
Vi = (int)Vin;
Vf =(int)( (Vin - (int)Vin)*100);
sprintf(&str2[0],"Vin[v]=%d.%d",Vi,Vf); // %f�i���������j�͖��T�|�[�g
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
lcd_printf(&str2[0]);// AD�ϊ��Ǎ��ݒl���t����2�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Delay10KTCYx(100); //200msec ���ɓǍ��݁@
// 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
}
void main (void)
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
OpenADC(ADC_FOSC_64 & //AD�ϊ��p�N���b�N�@�@�V�X�e���N���b�N��1/64�@0.05��sec�~64��3.2��sec�@>=�@1.6��sec�@���@OK
ADC_RIGHT_JUST & //�ϊ����ʂ̕ۑ����@�@���l�߁@
ADC_8_TAD, //AD�ϊ��̃A�N�C�W�V�����^�C���I���@3.2��sec�i=1Tad�j�~8Tad=25.6��sec�@�����@12.8��sec�@���@OK
ADC_CH0 & //AD�ϊ�����̃`�����l���I���iPIC18F�͓����ɕ�����AD�ϊ��͂ł��Ȃ��j
ADC_INT_OFF & //AD�ϊ��ł̊����ݎg�p�̗L��
ADC_VREFPLUS_VDD & //Vref+�̐ݒ�@�@�@�o�h�b�̓d���d���Ɠ����FADC_VREFPLUS_VDD �@or�@�O���i�`�m�R�j�̓d���FADC_VREFPLUS_EXT
ADC_VREFMINUS_VSS, //Vref-�̐ݒ�@�@�@�o�h�b��0�u�FADC_VREFMINUS_VSS or�@�O���iAN2)�̓d���FADC_VREFMINUS_EXT
0b1110 //�|�[�g�̃A�i���O�E�f�W�^���I���@�iADCON1�̉��ʂS�r�b�g���L�ځj�@�@AN0�̂݃A�i���O�|�[�g��I���A���̓f�W�^���|�[�g��I��
//�� �@�A�i���O�|�[�g���@AN0�̂� �� 0b1110�@�@�AAN0 & AN1�@���@0b1011�A AN0 & AN1 & AN2 ��1100�@���@�ڍ׃f�[�^�V�[�g�Q��
);
Delay10KTCYx(25);//50msec�t�������オ���҂@ 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"AD Converter !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start2 !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
while (1)
{
Ad_Func();
}
CloseADC();
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//*************************************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�@
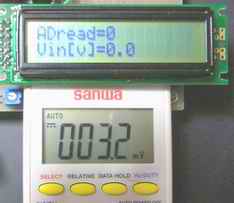
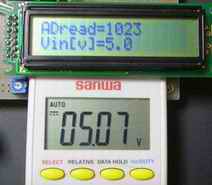
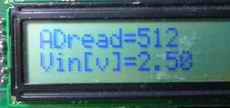
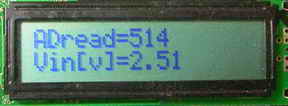
�����쌋�ʁ�
�@AN0�[�q�̓��͓d���i�f�W�^���e�X�^�\���l�j���@�T���@0���A�@2.5���A�@5.0���̎��̉t���\�����ȉ��Ɏ����܂��B
| AN0�[�q���͓d�� |
| 0�� |
|
2.5�� |
|
5.0�� |
 |
|
 |
|
 |
�@�i�Q�j���͓d�����t���ɕ\���iPIC18F�S�T�Q�j
�@�@PIC18F452�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B�@PIC�̎�ނɂ����
�@OpenADC()���̈����A�y�ш����̐����قȂ�܂��BPIC18F452�̏ꍇ�͈ꕔ�̐ݒ肪OpenADC()���̈����ł�
�@�ݒ肳��Ȃ��ׁA���W�X�^�ɒ��ڏ������ޕK�v������܂��B��̓I�ɂ́A�[�q�̑����i�A�i���O�|�[�g�A�f�W�^���|�[�g�A
�@+Vref�A�@-Vref�@�j��ݒ肷�邽�߂�ADCON2���W�X�^�̉��ʂS�r�b�g�ɒ��ڏ������݂܂��B
�@
�@������i�d�l��
�@�@�E�@PIC�P�WF452��AN0�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{�TV�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���200msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��PIC�P�WF452���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j
�@������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
/*
�@�@C18�R���p�C��
�@�@�@�@�@PIC18F452�@����AD�ϊ���H�Ǎ���
*/
#include <p18f452.h>
#include <adc.h>
#include <delays.h>
#include <stdio.h>
#include <stdlib.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config OSC = HSPLL // f = 40MHz ( �� 10MHz �~�@4�iPLL)�j
#pragma config WDT = OFF
#pragma config LVP = OFF
void lcd_printf(char* str) //�t���\���⏕��
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
}
void Ad_Func() //AD�ϊ��Ǎ��݁@���@�\��
{
int ADread;
char str[17];
char str2[30];
float Vin,Vin1000;
long int Vin1000i;
int Vi,Vf;
// SetChanADC(ADC_CH1); //�`�����l�����ւ���ꍇ
ConvertADC();
while( BusyADC()); //AD�ϊ����I���܂ő҂�
ADread = ReadADC(); //AD�ϊ��l�Ǎ���
//�t���֕\��
lcd_clear();
sprintf(str,"ADread=%d",ADread);
lcd_printf(&str[0]);// AD�ϊ��Ǎ��ݒl���t���ɂP�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Vin = (float)ADread/1023*5;
Vi = (int)Vin;
Vf =(int)( (Vin - (int)Vin)*100);
sprintf(&str2[0],"Vin[v]=%d.%d",Vi,Vf); // %f�i���������j�͖��T�|�[�g
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
lcd_printf(&str2[0]);// AD�ϊ��Ǎ��ݒl���t����2�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Delay10KTCYx(100); //200msec ���ɓǍ��݁@
// 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
}
void main (void)
{
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
OpenADC(ADC_FOSC_64 & //AD�ϊ��p�N���b�N�@�@�V�X�e���N���b�N��1/64�@0.05��sec�~64��3.2��sec�@>=�@1.6��sec�@���@OK
ADC_RIGHT_JUST & //�ϊ����ʂ̕ۑ����@�@���l�߁@
ADC_1ANA_0REF, //AD�ϊ��̃A�N�C�W�V�����^�C���I���@3.2��sec�i=1Tad�j�~8Tad=25.6��sec�@�����@12.8��sec�@���@OK
ADC_CH0 & //AD�ϊ�����̃`�����l���I���iPIC18F�͓����ɕ�����AD�ϊ��͂ł��Ȃ��j
ADC_INT_OFF //AD�ϊ��ł̊����ݎg�p�̗L��
);
ADCON1 = (ADCON1 & 0xF0) | 0b00001110; //0b1110 ���@�A�i���O�[�qRA0�̂݁@+Vref=Vdd -Vrerf=GND
// ADCON1�̉��ʂS�r�b�g�Œ[�q�̑������w�肷��@���@�A�i���O�[�q�A�f�W�^���[�q�A+Vref�[�q�A-Vref�[�q
//��@ �@0b1111�@���@RA0�̂݃A�i���O�[�q�A+Vref�[�q=RA3�A-Vref=RA2
//�@�@�@�@�@ 0b0100 �� RA0�ARA1,RA3�A�i���O�[�q�@�@+Vref=Vdd -Vrerf=GND�@�@���@�ڍ�18F452�̃f�[�^�V�[�g�Q�Ɓ@
Delay10KTCYx(25);//50msec�t�������オ���҂@ 10KT�F0.05��sec�~�S�~10000��2000��sec��2msec
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"AD Converter !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start2 !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
while (1)
{
Ad_Func();
}
CloseADC();
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//*************************************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD0 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u����
//1lcd_lib.c��C18�R���p�C���p�ɕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�@
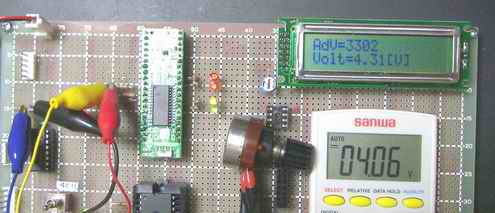
�@�����쌋�ʁ�
�@�@���͓d����2.5���̏ꍇ�̎ʐ^���ȉ��Ɏ����܂��B
�i3�j���͓d�����t���ɕ\���iPIC18F87K90�j
������i��H�}��PIC�P�WF87K90���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
/*
AD �R���o�[�^�@�P�Q�r�b�gAD�@
PC18F87K90
*/
#include <p18f87K90.h>
#include <stdio.h>
#include <delays.h>
#include <timers.h>
#include <adc.h>
#include "1lcd_lib_C18.h"
#include "1lcd_lib_C18.c"
#pragma config FOSC = XT //FOSC = HS //�@�V�X�e���N���b�N��1MH��
#pragma config XINST = OFF
#pragma config WDTEN = OFF //�E�H�b�h�b�N�^�C�}�@OFF
unsigned int Count_10msec;
char tempBuf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
long int ADread;
char str[17];
char str2[30];
float Vin,Vin1000;
long int Vin1000i;
int Vi,Vf;
void delay_ms (long int cycle) //�@CCS�R���p�C���Ɠ����@delay_ms(long int) ����v
{
long int i = 0;
for (i = 0; i < cycle; i++)Delay10TCYx(25); // 25 x 40��sec = 1000��sec // Delay10TCY():40��sec
}
void lcd_printf(char* str) //�t���\���⏕��
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
}
void Ad_Func() //AD�ϊ��Ǎ��݁@���@�\��
{
SetChanADC(ADC_CH0); //�`�����l�����ւ���ꍇ
ConvertADC();
while( BusyADC()); //AD�ϊ����I���܂ő҂�
ADread = ReadADC(); //AD�ϊ��l�Ǎ���
//�t���֕\��
lcd_clear();
sprintf(str,"ADread=%ld",ADread);
lcd_printf(&str[0]);// AD�ϊ��Ǎ��ݒl���t���ɂP�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Vin = (float)ADread/4095*3.3;
Vi = (int)Vin;
Vf =(int)( (Vin - (int)Vin)*100);
sprintf(&str2[0],"Vin[v]=%d.%d",Vi,Vf); // %f�i���������j�͖��T�|�[�g
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
lcd_printf(&str2[0]);// AD�ϊ��Ǎ��ݒl���t����2�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
}
#pragma interrupt my_Func // 10msec �^�C�}1�@�C���^�[�o�����荞��
#pragma code isrcode = 0x08
void isr_direct(void)
{ _asm goto my_Func _endasm }
#pragma code
void my_Func(void)
{
LATJbits.LATJ0 = 0;
PIR1bits.TMR1IF = 0; // �^�C�}1���荞�݃t���O���N���A����
WriteTimer1(15536); // 1��sec �~�@4�@�~�@1�@�~�@50000�@���@200000��sec�@=�@200msec �iat �V�X�e���N���b�N1MH���j
// 256�~256�@-�@50000�@=�@15536
Ad_Func();
LATJbits.LATJ0 = 1;
}
void main (void)
{
unsigned char channel=0x00,config1=0x00,config2=0x00,config3=0x00,portconfig=0x00;
TRISD = 0;
TRISJ = 0;
TRISAbits.TRISA0 = 1;
TRISAbits.TRISA3 = 1;
ANCON0 = 0b00001001; //RA0
ANCON1 = 0;
ANCON2 = 0;
config1 = //ADCON0: A/D CONTROL REGISTER 0
ADC_CH0 | //AD�ϊ�����̃`�����l���I���iPIC18F�͓����ɕ�����AD�ϊ��͂ł��Ȃ��j
ADC_INT_OFF | //AD�ϊ��ł̊����ݎg�p�̗L��
ADC_REF_VDD_VDD | //Vref+�̐ݒ�@�@�@�o�h�b�̂ucc
ADC_REF_VDD_VSS ; //Vref-�̐ݒ�@�@�@�o�h�b��0�u
//ADCON1: A/D CONTROL REGISTER 1
config2 = //ADCON2: A/D CONTROL REGISTER 2
ADC_FOSC_2 | //AD�ϊ��p�N���b�N�@�@�V�X�e���N���b�N��1/2�@
ADC_RIGHT_JUST | //�ϊ����ʂ̕ۑ����@�@���l�߁@
ADC_2_TAD ; //AD�ϊ��̃A�N�C�W�V�����^�C���I���@�ϊ��N���b�N���ԁi=1Tad�j�~2Tad
OpenADC(config1,config2,portconfig);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
sprintf(&tempBuf[0],"AD Converter !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(&tempBuf[0]," Start2 !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(&tempBuf[0]);
while (1)
{
Ad_Func();
delay_ms(200);
}
}
//************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//************************************************
#define lcd_port LATD //DataOutPort pin : ���4bit
#define lcd_stb LATDbits.LATD3 //stb OutPort
#define lcd_rs LATDbits.LATD2 // rs OutPort
#define port_Mode TRISD // Port Mode set
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C18.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//C18�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "delays.h"
#include "1lcd_lib_C18.h"
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
Delay10KTCYx(2); //2msec�҂� at 40MHz
else
Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�@
���@XC8�@�R���p�C���ҁ@
������i��H�}���@�@PIC�P�WF14K50���������ꍇ�̉�H�}���ȉ��Ɏ����܂��B�i����H�}��PDF�t�@�C���j

������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//AD �R���o�[�^�@
//�@�@�@�@�@�@�@�@�@�@�@�@�@�`�����l��AN8�iRC6�j
#include <p18f14K50.h>
#include <xc.h>
#include <stdio.h>
#include <stdarg.h>
#include "lcd_lib_XC8.h"
#define _XTAL_FREQ 48000000 //PLL ON Periferal= 12MHz x 4 = 48MHz
#pragma config CPUDIV = NOCLKDIV ,USBDIV = OFF,PCLKEN = ON
#pragma config FOSC = HS,PLLEN = ON, HFOFST = OFF //PLL ON Periferal= 12MHz x 4 = 48MHz
#pragma config PWRTEN = ON, BOREN = OFF, MCLRE = OFF, BORV = 30
#pragma config WDTEN = OFF,LVP = OFF,FCMEN = OFF, IESO = OFF
#pragma config CP0 = OFF,XINST = OFF
#pragma config STVREN = OFF, BBSIZ = OFF,CPB = OFF,CP1 = OFF,CPD = OFF //�ȗ������warnig ���ł�
#pragma config WRT0 = OFF,WRT1 = OFF,WRTC = OFF,WRTB = OFF,EBTR0 = OFF,EBTR1 = OFF,EBTRB = OFF //�ȗ������warnig ���ł�
char Buf[17]; //�t���\���f�[�^�̈ꎞ�ۑ����W�X�^
int Mode = 0;
int ADread;
float Vin,Vin1000;
long int Vin1000i;
int Vi,Vf;
void delay_ms(unsigned short msec) //1msec�x����
{
unsigned short i;
for(i=0; i<msec; i++)
__delay_ms(1); // __delay_ms(n); //n = 1?16
// __delay_us(1); //__delay_us(n); //n = 1?16426 //1��sec�x����
}
void lcd_printf(char* str) //�t���\���⏕��
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++;
}
}
void AdFunc(void)
{
char* pStr;
ADCON0 = 0b00100001; //AN8(RC6)�I���AAD�R���o�[�^�L����
ADCON0bits.GO = 1; // AD�ϊ��J�n
while (ADCON0bits.GO); // AD�ϊ������҂�
ADread = ADRESL+(ADRESH*256); // 10bit�̒l�ɕϊ�
//�t���֕\��
lcd_clear();
pStr = &Buf[0];
sprintf(pStr,"ADread=%d",ADread);
lcd_printf(pStr);// AD�ϊ��Ǎ��ݒl���t���ɂP�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
Vin = (float)ADread/1023*5;
Vi = (int)Vin;
Vf =(int)( (Vin - (int)Vin)*100);
sprintf(pStr,"Vin[v]=%d.%d",Vi,Vf); // %f�i���������j�͖��T�|�[�g
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
lcd_printf(pStr);// AD�ϊ��Ǎ��ݒl���t����2�s�ڂɕ\���@�@�@�@�Ǎ��ݒl�F1023(at 5V)
}
int main()
{
char* pStr;
ANSEL = 0x00; // �f�W�^���ɐݒ�
ANSEL = 0x00; // �f�W�^���ɐݒ�
ANSELH =0b00000011; // RC6(AN8),RC7(AM9)�̂݃A�i���O
// ADC������
// ADCON0 = 0; // ��~
ADCON0bits.ADON = 0; //ADC: Disable
// ADCON1 = 0; // VDD-Vss
ADCON1bits.PVCFG0 = 0; // Vref+ = Vdd //Positive Voltage Reference select bit
ADCON1bits.PVCFG1 = 0; //
ADCON1bits.NVCFG0 = 0; //Vref- = GND //Negative Voltage Reference select bit
ADCON1bits.NVCFG1 = 0;
// ADCON2 = 0xBE; // �E�l��,20Tad,Fosc/64
ADCON2bits.ADFM = 1; //�E�l��
ADCON2bits.ADCS0 = 0; //110: FOSC/64 //AD�ϊ��p�N���b�N�I�� //A/D Conversion Clock Select bits
ADCON2bits.ADCS1 = 1;
ADCON2bits.ADCS2 = 1;
ADCON2bits.ACQT0 = 1; //20TAD; //TAD(AD�ϊ��p�N���b�N�����j�~20 //�A�N�C�W�V�����^�C���i�[�d���ԁj
///A/D Acquisition time select bits. Acquisition time is the duration that the A/D charge
ADCON2bits.ACQT1 = 1; //holding capacitor remains connected to A/D channel from the instant the GO/DONE bit is
ADCON2bits.ACQT2 = 1; //set until conversions begins.
TRISC = 0b11000000;
TRISB = 0;
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear();
pStr = &Buf[0];
lcd_cmd(0x80); //1�s�ڂ̐擪��
sprintf(pStr,"XC8"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(pStr);
lcd_cmd(0xC0);//�Q�s�ڂ̐擪��
sprintf(pStr," A/D Start !!"); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_printf(pStr);
delay_ms(2000);
while(1)
{
AdFunc();
delay_ms(500);
}
return 0;
}
//************************************************
//�C���N���[�h�t�@�C�� lcd_lib_XC8.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//XC8�R���p�C���p�ɕύX�������̂ł��B
//************************************************
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB6 //LCD��DB6�i13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB5 //LCD��DB5 (12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATCbits.LATC5 //stb OutPort
#define lcd_rs LATCbits.LATC4 // rs OutPort
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_out(char code, char flag);
//***********************************************
//�C���N���[�h�t�@�C�� lcd_lib_XC8.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u������
//XC8�R���p�C���p�ɕύX�������̂ł��B
//***********************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C18�R���p�C���[
// �������͈ȉ�
// lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//////////////////////////////////////////////
#include "lcd_lib_XC8.h"
#include <p18f14K50.h>
#include <stdio.h>
#include <stdlib.h>
#define _XTAL_FREQ 48000000
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
//port_Mode = 0; // PIC���́@DataPort�AstbPort�A rsPort ���o�̓��[�h�ɐݒ�
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
//lcd_port = code & 0xF0;
if (flag == 0)
lcd_rs = 1; //�\���f�[�^�̏ꍇ
else
lcd_rs = 0; //�R�}���h�f�[�^�̏ꍇ
_delay(10); //Delay10TCYx(1); //10NOP
lcd_stb = 1; //strobe out
_delay(10); //Delay10TCYx(1); //10NOP
lcd_stb = 0; //reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); //��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); //���ʂS�r�b�g�o��
_delay(500); //Delay10TCYx(50); //500NOP (50��sec�҂� at 40MHz)
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); //��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); //���ʂS�r�b�g�o��
if((cmd & 0x03) != 0)
__delay_ms(2); //Delay10KTCYx(2); //2msec�҂� at 40MHz
else
__delay_us(50); //Delay10TCYx(50); //50usec�҂� at 40MHz
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); //�������R�}���h�o��
// Delay10KTCYx(15); //15msec�҂� at 40MHz
}
/////// ��������
void lcd_init(void)
{
lcd_out(0x30, 1); //8bit mode set
__delay_ms(5); //Delay10KTCYx(5); //5msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
__delay_ms(1); //Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x30, 1); //8bit mode set
__delay_ms(1); //Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_out(0x20, 1); //4bit mode set
__delay_ms(1); //Delay10KTCYx(1); //1msec�҂� at 40MHz
lcd_cmd(0x2E); //DL=0 4bit mode
lcd_cmd(0x08); //display off C=D=B=0
lcd_cmd(0x0D); //display on C=D=1 B=0
lcd_cmd(0x06); //entry I/D=1 S=0
lcd_cmd(0x01); //all clear
}
�@�����쌋�ʁ�
| ���͓d�� |
�t���\�� |
| 0V |
 |
| 2.5V |
 |
| 5.0V |
 |
���@C30�R���p�C���@dsPIC��
�@�@C30�R���p�C���̏ꍇ�A����AD�R���o�[�^�����12bitAD�ϊ��l�Ǎ��݂̊�{�I�ȗ���͈ȉ��̂悤�ɂȂ�܂��B
�@�@�@�@�@�@OpenADC12() ���Ł@SFR�̐ݒ�������Ȃ��B
�@�@�@�@�A�@SetChanADC12�i�j���Ł@�ǂݍ��݂̃`�����l����I������B
�@�@�@�@�B�@ConvertADC12()���Ł@�ǂݍ��݂��J�n����B�@(��1)( ADCON1bits.SAMP =1; )
�@�@�@�@�C�@BusyADC12()���Ł@AD�ϊ�����������̂�҂@(��1)( while(!ADCON1bits.DONE); )
�@�@�@�@�D�@ReadADC12()���Ł@AD�ϊ��l��ǂݍ��ށ@(��1)(AdcValue = ADCBUF0;)
�@�@�@�@�E�@CloseADC12�i�j���Ł@AD�ϊ���Disable�ɂ���
�@�@�@�@�@�@(��1)�i�@�j���̂悤�ɒ��ڃ��W�X�^�ɃA�N�Z�X�������������悤�ł��B
�i���Q�j10�r�b�g�p�̊��͊��̖���12��10�ƂȂ�܂��B
�@
�i�P�j���͓d�����t���ɕ\���idsPIC�R�OF�Q�O�P�Q�j
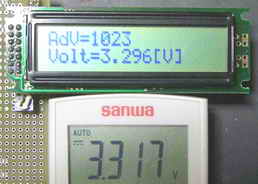
�@�@dsPIC�R�OF�Q�O�P�Q�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B�������݂�ICSP��
�@�g���Ă��܂��B
�@������i�d�l��
�@�@�E�@dsPIC�R�OF�Q�O�P�Q��AN�R�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{�TV�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���200msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��
�@�@dsPIC�R�OF�Q�O�P�Q�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
�@���v���O�����၄
///************************************************************/
//* AD�ϊ��@�t���\��
//* dsPIC30F2012
//************************************************************/
// MPLAB�@�v���W�F�N�g�ւ̒lj��t�@�C��
// Linker Script�t�H���_�@ p30f2012.gld
// Library Files�t�H���_�@ lib30F2012-coff.a
#include "p30f2012.h"
#include <stdio.h>
#include <adc12.h>
#include <timer.h>
#include "1lcd_lib_C30.h"
_FOSC(CSW_FSCM_OFF & // �N���b�N��ւ��Ȃ��A�t�F�[���Z�C�t�N���b�N���j�^�Ȃ�
FRC_PLL16 //��������RC���U��(7.37MHz�j�APLL�F16�{�@���@�V�X�e���N���b�N���g����7.37�~16��117.92MHz
);
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & //�u���E���A�E�g���Z�b�g�@�\�FON
BORV_42 & //�u���E���A�E�g�d���F4.2V
PWRT_64 & //�p���[�I�����Z�b�g�^�C�}64msec
MCLR_EN //MCLR�@�\�FON
);
_FGS(CODE_PROT_OFF); //�R�[�h�v���e�N�g�FOFF
unsigned int Config1 = //ADCON1���W�X�^�̐ݒ�
ADC_MODULE_ON & //ADON bit15=1 �F AD�R���o�[�^���W���[���@���@ON //AD Module On/Off
ADC_IDLE_CONTINUE & //ADSIL bit13=0 �F �A�C�h�����̓���@���@����p�� //Idle Mode Operation
ADC_FORMAT_INTG & //FORM bit9-8=00 :�o�̓f�[�^�̃t�H�[�}�b�g�@���@���� //Result Output Format
ADC_CLK_AUTO & //SSRC bit5-7=111 :�ϊ��J�n�g���K�ݒ� //Conversion Trigger Source
// ��ADCON3��SAMC�ɂ��N���b�N�i�T���v���z�[���h�j���I����ϊ������J�n
ADC_AUTO_SAMPLING_OFF & //ASAM bit2=1�@: AD�T���v�����O�����J�n���蓮�J�n�@//Auto Sampling Select
ADC_SAMP_OFF; //SAMP bit1=0�@: �T���v�����O�蓮���䁨OFF //Sample Enable
//�@�@�i��jASAM = 0(ADC_AUTO_SAMPLING_OFF) �̎��@SAMP=1(ADC_SAMP_ON)�ŕϊ��J�n
//DONE�@bit0 : AD�ϊ��I���t���O�iAD�ϊ����I������ƂP�����A�@�������ݕs�j
unsigned int Config2 = //ADCON2���W�X�^�̐ݒ�
ADC_VREF_AVDD_AVSS & //VCFG bit13-15=000: S/H�A���v�̃��t�@�����X�ݒ�: ��d��Vdd�A�V���O���G���h�@//Voltage Reference
ADC_SCAN_OFF & //CSCNA bit10=0 �F MUX���ݎ����X�L�������䁨�I�t //Scan Section
ADC_SAMPLES_PER_INT_1 & //SMPI bit2-5 : �����ݕp�x���P�� //Number of Samples between Interrupts
ADC_ALT_BUF_OFF & //BUFM bit1=0: ���݃o�b�t�@�[���䁨�Ȃ� //Buffer mode Select
ADC_ALT_INPUT_OFF; //ALTS bit0=0: AD���͂̕����o�b�t�@�[�ւ̊i�[//Alternate Input sample Mode Select(
unsigned int Config3 = //ADCON3���W�X�^�̐ݒ�
ADC_SAMPLE_TIME_10 & //SAMC bit8-12�@:�T���v���z�[���h���� ���@10�T�C�N��(TAD)//Auto Sample Time bits
ADC_CONV_CLK_SYSTEM & //ADRC bit7=0�@:AD�ϊ��N���b�N���V�X�e���N���b�N�@//Conversion Clock Source Select
ADC_CONV_CLK_32Tcy; //ADCS bit0-5�@:�ϊ��N���b�N����32Tcy�i�ݒ��MAX��I���j�@//Conversion Clock Select
unsigned int ConfigPort = //ADPCFG���W�X�^�̐ݒ� ANLOG/DIGITAl Pin Select
//ex1. ENABLE_ALL_ANA ex2. ENABLE_ALL_DIG ex3. ENABLE_AN0_ANA & ENABLE_AN1_ANA
ENABLE_AN3_ANA; //AN1 ���@�A�i���O�|�[�g
unsigned int ConfigScan = //ADCSSL���W�X�^�̐ݒ�@ Scan Channel Select
SCAN_NONE; //ADCSLL = 0x0000 : �����X�L�������X�L��������
unsigned int Channel1 = //ADCHS���W�X�^�̐ݒ�
ADC_CH0_POS_SAMPLEA_AN3 & //�}���`�v���N�TA�iS/H�A���v�j��Vref+�ւ̐ڑ��`�����l���@���@�`�����l��1
ADC_CH0_NEG_SAMPLEA_NVREF; //�}���`�v���N�TA�iS/H�A���v�j��Vref-�ւ̐ڑ��`�����l���@���@Vss
void AdcFunc(void);
void delay_ms(unsigned int);
unsigned int Count=0;
unsigned int AdcValue;
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void AdcFunc(void) // AD�ϊ��ǂݎ��@���@�t���\��
{
float Volt;
unsigned int I;
unsigned int F;
SetChanADC12(Channel1); //Vref-(RB1�AAN1) ���@GND
ADCON1bits.SAMP =1; //�T���v�����O�J�n
//�T���v���z�[���h���ԁF8TAD�@�iADCON�R��SAMC<3:0>)
//�ϊ��̎����J�n //�ϊ����ԁF31TAD�@�iADCON3��ADCS<5:0>)
// while(BusyADC12());
while(!ADCON1bits.DONE); //AD�ϊ��I���t���O���P�ɂȂ�܂ł܂�
// AdcValue = ReadADC12(0); //AD�ϊ��l�Ǎ��݁i�Ǎ��݂��x���j
AdcValue = ADCBUF0; //AD�ϊ��l�Ǎ��݁i���W�X�^���ǁ@���@�Ǎ��݂������j
Count++;
lcd_clear(); //�S����
sprintf(Buf,"AdV=%u",AdcValue); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Volt =(float)AdcValue/4095*5;
I = (unsigned int) Volt;
F = (unsigned int)(( Volt - I)*1000);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"Volt=%u.%u[V]",I,F); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
}
void _ISR _T1Interrupt(void) //�^�C�}�P������
{
IFS0bits.T1IF = 0; //�t���O�N���A
AdcFunc(); // AD�ϊ��ǂݎ��@���@�t���\��
}
/// ���C����
int main(void) {
TRISB = 0b0000000000001000; // AD���͂�bit3(AN3 RB3)�̂ݓ���
TRISF = 0;
// A/D�ϊ����W���[���̃I�t���m�F���܂�
ADCON1bits.ADON=0;
ConfigIntADC12(ADC_INT_DISABLE);
OpenADC12(
Config1, //ADCON1���W�X�^�̐ݒ�
Config2, //ADCON2���W�X�^�̐ݒ�
Config3, //ADCON3���W�X�^�̐ݒ�
ConfigPort, //ADPCFG���W�X�^�̐ݒ�
ConfigScan //ADCSSL���W�X�^�̐ݒ�
);
/// �^�C�}�P�����@200msec
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����ON
T1_PS_1_256 & //�v���X�P�[���@1/256
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT , //�N���b�N���F�����N���b�N
23030 //200msec �� 200�~1000�~�i117.92MHz/4MHz)/256=23031.25
); //PR1 = 23031 -1 = 23030
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"ADC Start !!%u",Count); //arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
while(1) //�^�C�}�����݂�҂�
{
}
CloseADC12(); //AD�ϊ��I������
return 0;
}
//*********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//*********************************************************************************************
#include "p30f2012.h"
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB12 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB11 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB10 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB9 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATFbits.LATF0 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATFbits.LATF1 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//********************************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
�@AN3�[�q�̓��͓d���i�f�W�^���e�X�^�\���l�j���@�T���@0���A�@2.5���A�@5.0���̎��̉t���\�����ȉ��Ɏ����܂��B
�@�i�Q�j���͓d�����t���ɕ\���idsPIC�R�OF�S�O�P�R�j
�@�@dsPIC�R�OF�S�O�P�R�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B
�@������i�d�l��
�@�@�E�@dsPIC�R�OF�S�O�P�R��AN1�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{�TV�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���200msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��
�@�@dsPIC�R�OF�S�O�P�R�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�

�@���v���O�����၄
///************************************************************/
// AD�R���o�[�^�o�͂̉t���\��
//�@�@�@�@�@�@ �@dsPIC30F4013
//************************************************************/
#include "p30f4013.h"
#include "1lcd_lib_C30.h"
#include "adc12.h"
#include "stdio.h"
_FOSC(CSW_FSCM_OFF & XT_PLL8); // (10MHz)x8=80MHz
_FWDT(WDT_OFF);
_FBORPOR(PBOR_ON & BORV_42 & PWRT_64 & MCLR_EN);
_FGS(CODE_PROT_OFF);
unsigned int Config1 = //ADCON1���W�X�^�̐ݒ�
ADC_MODULE_ON & //ADON bit15=1 �F AD�R���o�[�^���W���[���@���@ON //AD Module On/Off
ADC_IDLE_CONTINUE & //ADSIL bit13=0 �F �A�C�h�����̓���@���@����p�� //Idle Mode Operation
ADC_FORMAT_INTG & //FORM bit9-8=00 :�o�̓f�[�^�̃t�H�[�}�b�g�@���@���� //Result Output Format
ADC_CLK_AUTO & //SSRC bit5-7=111 :�ϊ��J�n�g���K�ݒ� //Conversion Trigger Source
// ��ADCON3��SAMC�ɂ��N���b�N�i�T���v���z�[���h�j���I����ϊ������J�n
ADC_AUTO_SAMPLING_OFF & //ASAM bit2=1�@: AD�T���v�����O�����J�n���蓮�J�n�@//Auto Sampling Select
ADC_SAMP_OFF; //SAMP bit1=0�@: �T���v�����O�蓮���䁨OFF //Sample Enable
//�@�@�i��jASAM = 0(ADC_AUTO_SAMPLING_OFF) �̎��@SAMP=1(ADC_SAMP_ON)�ŕϊ��J�n
//DONE�@bit0 : AD�ϊ��I���t���O�iAD�ϊ����I������ƂP�����A�@�������ݕs�j
unsigned int Config2 = //ADCON2���W�X�^�̐ݒ�
ADC_VREF_AVDD_AVSS & //VCFG bit13-15=000: S/H�A���v�̃��t�@�����X�ݒ�: ��d��Vdd�A�V���O���G���h�@//Voltage Reference
ADC_SCAN_OFF & //CSCNA bit10=0 �F MUX���ݎ����X�L�������䁨�I�t //Scan Section
ADC_SAMPLES_PER_INT_1 & //SMPI bit2-5 : �����ݕp�x���P�� //Number of Samples between Interrupts
ADC_ALT_BUF_OFF & //BUFM bit1=0: ���݃o�b�t�@�[���䁨�Ȃ� //Buffer mode Select
ADC_ALT_INPUT_OFF; //ALTS bit0=0: AD���͂̕����o�b�t�@�[�ւ̊i�[//Alternate Input sample Mode Select(
unsigned int Config3 = //ADCON3���W�X�^�̐ݒ�
ADC_SAMPLE_TIME_8 & //SAMC bit8-12�@:�T���v���z�[���h���� ���@�W�T�C�N��(TAD)//Auto Sample Time bits
ADC_CONV_CLK_SYSTEM & //ADRC bit7=0�@:AD�ϊ��N���b�N���V�X�e���N���b�N�@//Conversion Clock Source Select
ADC_CONV_CLK_32Tcy; //ADCS bit0-5�@:�ϊ��N���b�N����32Tcy�i�ݒ��MAX��I���j�@//Conversion Clock Select
unsigned int ConfigPort = //ADPCFG���W�X�^�̐ݒ� ANLOG/DIGITAl Pin Select
//ex1. ENABLE_ALL_ANA ex2. ENABLE_ALL_DIG ex3. ENABLE_AN0_ANA & ENABLE_AN1_ANA
ENABLE_AN1_ANA; //AN1 ���@�A�i���O�|�[�g
unsigned int ConfigScan = //ADCSSL���W�X�^�̐ݒ�@ Scan Channel Select
SCAN_NONE; //ADCSLL = 0x0000 : �����X�L�������X�L��������
unsigned int Channel1 = //ADCHS���W�X�^�̐ݒ�
ADC_CH0_POS_SAMPLEA_AN1 & //�}���`�v���N�TA�iS/H�A���v�j��Vref+�ւ̐ڑ��`�����l���@���@�`�����l��1
ADC_CH0_NEG_SAMPLEA_NVREF; //�}���`�v���N�TA�iS/H�A���v�j��Vref-�ւ̐ڑ��`�����l���@���@Vss
unsigned int Count;
unsigned int AdcValue;
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
void delay_ms(unsigned int);
void AdcFunc(void);
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void AdcFunc(void) // AD�ϊ��ǂݎ��@���@�t���\��
{
float Volt;
unsigned int I;
unsigned int F;
SetChanADC12(Channel1); //Vref-(RB1�AAN1) ���@GND
ADCON1bits.SAMP =1; //�T���v�����O�J�n
//�T���v���z�[���h���ԁF8TAD�@�iADCON�R��SAMC<3:0>)
//�ϊ��̎����J�n
//�ϊ����ԁF31TAD�@�iADCON3��ADCS<5:0>)
// while(BusyADC12());
while(!ADCON1bits.DONE); //AD�ϊ��I���t���O���P�ɂȂ�܂ł܂�
// AdcValue = ReadADC12(0); //AD�ϊ��l�Ǎ��݁i�Ǎ��݂��x���j C30�̃o�O�H
AdcValue = ADCBUF0; //AD�ϊ��l�Ǎ��݁i�Ǎ��݂������j //�o�b�t�@�[0�̓ǂݏo��
lcd_clear(); //�S����
sprintf(Buf,"AdV=%u",AdcValue); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Count++;
Volt =(float)AdcValue/4095*5;
I = (unsigned int) Volt;
F = (unsigned int)(( Volt - I)*1000);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"Volt=%u.%u[V]",I,F); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(200); //200msec���ɍĕ\��
}
/// ���C����
int main(void) {
TRISB = 0b0000000000000010; // AD���͂�bit1(AN1 RB1)�̂ݓ���
TRISF = 0;
OpenADC12(
Config1, //ADCON1���W�X�^�̐ݒ�
Config2, //ADCON2���W�X�^�̐ݒ�
Config3, //ADCON3���W�X�^�̐ݒ�
ConfigPort, //ADPCFG���W�X�^�̐ݒ�
ConfigScan //ADCSSL���W�X�^�̐ݒ�
);
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"ADC Start !!%u",Count);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
while(1)
{
AdcFunc(); // AD�ϊ��ǂݎ��@���@�t���\��
}
CloseADC12(); //AD�ϊ��I������
return 0;
}
//*********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//*********************************************************************************************
#include "p30f4013.h"
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB12 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB11 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB10 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB9 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATFbits.LATF0 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATFbits.LATF1 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**********************************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή��A�y�ѕ��U�|�[�g�Ή����ŕύX�����������̂ł��B
//**********************************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
�@AN1�[�q�̓��͓d���i�f�W�^���e�X�^�\���l�j���@�T���@0���A�@2.5���A�@5.0���̎��̉t���\�����ȉ��Ɏ����܂��B
| AN1�[�q�̓��͓d�� |
| 0V |
|
2.5V |
|
5V |
 |
|
 |
|
 |
���@C30�R���p�C���@PIC24��
�@�@���͓d�����t���ɕ\������B
�@PIC24FJ64GA002�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B
�@������i�d�l��
�@�@�E�@PIC24FJ64GA002��AN0�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{3.3V�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���200msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��
�@�@PIC24FJ64GA002�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
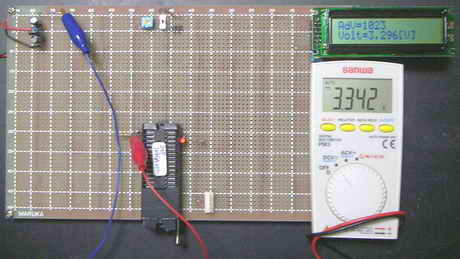
���v���O�����၄
///************************************************************/
//* AD�ϊ��@�t���\��
//* PIC24FJ64GA002
//************************************************************/
#include "p24FJ64GA002.h"
#include <stdio.h>
//#include <adc10.h> //���idsPIC�Ɠ����悤�ɂ́j�C���N���[�h�ł��Ȃ�
#include <timer.h>
#include "1lcd_lib_C30.h"
#include "1lcd_lib_c30.c"
/// �R���t�B�M�����[�V���� �r�b�g�̐ݒ�
_CONFIG1( JTAGEN_OFF & //JTAG�|�[�g�F�@OFF
GCP_OFF & //�R�[�h�v���e�N�g�F�@OFF
GWRP_OFF & //�������݃v���e�N�g�F�@OFF
BKBUG_OFF & //�o�b�N�O�����h�f�o�b�N�F�@OFF
COE_OFF & //�N���b�v�I���@�G�~�����[�V�����F�@OFF
ICS_PGx1& //ICD�s���̑I���F�@EMUC/EMUD��PGC1/PGD1�Ƌ��p
FWDTEN_OFF )//�E�H�b�`�h�b�N�^�C�}�F�@OFF
_CONFIG2( IESO_OFF & // �Q���x�X�^�[�g�A�b�v�@�\�FOFF
FNOSC_FRCPLL & //��������RC���U�i8MHZ)��H�@�{�@4�{PLL�@���@32MH���i=�@8MHz�@�~�@4�j
FCKSM_CSDCMD & //�N���b�N�ؑւ�����FOFF�@�N���b�N���j�^�FOFF
OSCIOFNC_OFF & //OSCO/RC15 function�F�@OSCO or Fosc/2
IOL1WAY_OFF & //RP Register Protection�F�@Unlimited Writes To RP Registers
I2C1SEL_PRI & //I2C1 pins Select�F�@Use Primary I2C1 pins
POSCMOD_NONE) //���U��H���[�h�@Oscillator Selection:�@ Primary disabled
unsigned int AdcValue;
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
unsigned int Count=0;
void delay_ms(unsigned int N) //�E�F�C�g��
{
__delay32(Clock/4000*N);
}
void AdcFunc(void) // AD�ϊ��ǂݎ��@���@�t���\��
{
float Volt;
unsigned int I;
unsigned int F;
AD1CON1bits.SAMP =1; //�T���v�����O�J�n
while(!AD1CON1bits.DONE); //AD�ϊ��I���t���O�����i�P�ɂȂ�܂Łj�҂�
// delay_ms(1);
AdcValue = ADC1BUF0; //ADC1��AN0�̃o�b�t�@�[����AD�ϊ����ʂ�Ǎ���
lcd_clear(); //�S����
sprintf(Buf,"AdV=%u",AdcValue); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Volt =(float)AdcValue/1024*3.3;
I = (unsigned int) Volt;
F = (unsigned int)(( Volt - I)*1000);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"Volt=%u.%u[V]",I,F); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
}
void _ISR _T1Interrupt(void) //�^�C�}�P������
{
IFS0bits.T1IF = 0; //�t���O�N���A
AdcFunc(); // AD�ϊ��ǂݎ��@���@�t���\��
}
/// ���C����
int main(void)
{
TRISA = 0xFFFF; //A�|�[�g����̓��[�h�ɐݒ�
TRISB = 0; //B�|�[�g���o�̓��[�h�ɐݒ�
//AD1CON1���W�X�^�̐ݒ�
AD1CON1bits.ADON = 1; //A/D�R���o�[�^���W���[���L��
AD1CON1bits.ADSIDL = 0; //�A�C�h�����[�h�������W���[������p��
AD1CON1bits.FORM1 = 0; //AD1CON1bits.FORM0 ��2�r�b�g�ŃZ�b�g
AD1CON1bits.FORM0 = 0; //00: �����Ȃ������@�i�Q�l�j11�F�����Ȃ��Œ菭���A10�F�Œ菭���A01�F����
//���@Michrochip PIC24FJ64GA002�̃f�[�^�V�[�g�ł�00��Integer�ƂȂ��Ă��邪Unsigned Integer�̌�A�ł���B�@
AD1CON1bits.SSRC2 = 1; //AD1CON1bits.SSRC2-AD1CON1bits.SSRC0 �ŃZ�b�g
AD1CON1bits.SSRC1 = 1; //111�F�@�����J�E���^�ŃT���v�����O���I�������ϊ����J�n����
AD1CON1bits.SSRC0 = 1; //�i�Q�l�j000�F�@SAMP�r�b�g�ŃT���v�����O���I�����ϊ����J�n����
AD1CON1bits.ASAM = 0; //SAMP�r�b�g�̃Z�b�g�ŃT���v�����O���J�n����B�@�i�Q�l�j1�F�@�����J�n�i�O�̕ϊ��I���シ���T���v�����O���J�n����j
AD1CON1bits.SAMP = 0; //�T���v�����O��~
//AD1CON2���W�X�^�̐ݒ�
AD1CON2bits.VCFG2 = 0; //AD1CON2bits.VCFG2 - AD1CON2bits.VCFG0�iVCFG��2�F0���j��3�r�b�g�ŃZ�b�g
AD1CON2bits.VCFG1 = 0; //000�F���t�@�����X�d���@���@Vdd�@-Vss
AD1CON2bits.VCFG0 = 0; //�i�Q�l�j001�F���t�@�����X�d�� �� �O������ -�@Vss ��
AD1CON2bits.CSCNA = 1; //�}���`�v���N�TMUXA�ł̃X�L�����F�@����
AD1CON2bits.SMPI3 = 0; //AD1CON2bits.SMPI3 - AD1CON2bits.SMPI0�iSMPI<3:0>�j��4�r�b�g�ŃZ�b�g
AD1CON2bits.SMPI2 = 0; //0000�F�@AD�ϊ��������̊��荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI1 = 0; //(�Q�l�j0011�F�@4�T���v����AD�ϊ��I���� ���荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI0 = 0; //
AD1CON2bits.BUFM = 0; //�o�b�t�@�[��1��16���[�h�o�b�t�@�Ƃ���B�@�i�Q�l�j1�F�@2�g��8���[�h�o�b�t�@�[�Ƃ���
AD1CON2bits.ALTS = 0; //���MUXA����̓}���`�v���N�T�ɂ���@�i�Q�l�j1�F�@MUXA,MUXB�����݂ɂ���
//AD1CON3���W�X�^�̐ݒ�
AD1CON3bits.ADRC = 0; //AD�ϊ��N���b�N���F�V�X�e���N���b�N�@�i�Q�l�j1�F�@A/D����RC�N���b�N
AD1CON3bits.SAMC4 = 1; //AD1CON3bits.SAMC4 - AD1CON3bits.SAMC0(SAMC<4:0>)��5�r�b�g�ŃZ�b�g
AD1CON3bits.SAMC3 = 1; //�A�N�C�W�V�����^�C���iTad�i�N���b�N�����j�~N�j�ݒ�
AD1CON3bits.SAMC2 = 1; //1111�F 31Tad
AD1CON3bits.SAMC1 = 1; //�i�Q�l�j0001�F 1Tad �@0010�F 2Tad �@�@�@0011�F 3Tad�@�@�E�E�E�E
AD1CON3bits.SAMC0 = 1; //
AD1CON3bits.ADCS7 = 0; //AD1CON3bits.ADCS7 -�@AD1CON3bits.ADCS0�iADCS��7�F0���j��8�r�b�g�ŃZ�b�g
AD1CON3bits.ADCS6 = 0; //AD�ϊ��̃N���b�N�ƃN���b�N���̊W
AD1CON3bits.ADCS5 = 0; //0000 0101�F�@1Tad = 5Tcy
AD1CON3bits.ADCS4 = 0; //�i�Q�l�j 0000 0000�F�@1Tad�@=�@0.5Tcy
AD1CON3bits.ADCS3 = 0; // 0000 0001�F�@1Tad = 1.0Tcy
AD1CON3bits.ADCS2 = 1; // 0000 0010�F�@1Tad�@=�@1.5Tcy
AD1CON3bits.ADCS1 = 0; // �@�@�E�E�E�E�@�@�@�@
AD1CON3bits.ADCS0 = 1; //�@�@�@�@�@1111 1111�F 1Tad = 128Tcy
//AD1CHS���W�X�^�̐ݒ�
AD1CHSbits.CH0NB = 0; //�}���`�v���N�TMUXB�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SB3 = 0; //AD1CHSbits.CH0SB3 - AD1CHSBbits.CH0SB0�i��CH0SB��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SB2 = 0; //�}���`�v���N�TMUXB�̐������͑I��
AD1CHSbits.CH0SB1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SB0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
AD1CHSbits.CH0NA = 0; //�}���`�v���N�TMUXA�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SA3 = 0; //AD1CHSbits.CH0SA3 - AD1CHSbits.CH0SA0�i��CH0SA��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SA2 = 0; //�}���`�v���N�TMUXA�̐������͑I��
AD1CHSbits.CH0SA1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SA0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
//AD1PCFG���W�X�^�̐ݒ�@�@
//�@���f�o�C�X���Z�b�g�ł͑S�r�b�g0�ƂȂ邽�߃f�t�H���g�ł̓A�i���O���͂ƂȂ�̂Ńf�W�^���Ŏg�����d�s���́A�R���t�B�O���[�V�����Ńf�W�^���ݒ肪�K�v!!�@
//PIC24FJ64GA002�ɂ͂Ȃ��s���E�ݒ�����ɕK�v�Ȃ����ݒ�
AD1PCFGbits.PCFG15 = 1;//RA15/AN15�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG14 = 1;//RA14/AN14�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG13 = 1;//RA13/AN13�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG12 = 1;//RA12/AN12�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG11 = 1;//RA11/AN11�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG10 = 1;//RA10/AN10�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG9 = 1;//RA9/AN9�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG8 = 1;//RA8/AN8�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG7 = 1;//RA7/AN7�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
// AD1PCFGbits.PCFG6 = 1;//RA6/AN6�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG5 = 1;//RA5/AN5�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG4 = 1;//RA4/AN4�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG3 = 1;//RA3/AN3�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG2 = 1;//RA2/AN2�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG1 = 1;//RA1/AN1�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG0 = 0;//RA0/AN0�A�i���O����or�f�W�^�����͑I���F�@�A�i���O�@�i�Q�l�j0�F�@�f�W�^��
// AD1CSSL���W�X�^�̐ݒ�
//�ǂݍ��ރ`�����l���i���͒[�q�j���Z�b�g����
AD1CSSLbits.CSSL15 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL14 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL13 = 0; //AN13��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL12 = 0; //AN12��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL11 = 0; //AN11��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL10 = 0; //AN10��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL9 = 0; //AN9��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL8 = 0; //AN8��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL7 = 0; //AN7��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
// AD1CSSLbits.CSSL6 = 0; //AN6��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL5 = 0; //AN5��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL4 = 0; //AN4��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL3 = 0; //AN3��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL2 = 0; //AN2��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL1 = 0; //AN1��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL0 = 1; //AN0��MUXA�ŃX�L��������@�i�Q�l�j0�F�@�X�L�������Ȃ�
/// �^�C�}�P�����@200msec
OpenTimer1(T1_ON & //�^�C�}�PON
T1_GATE_OFF & //�Q�[�g����ON
T1_PS_1_64 & //�v���X�P�[���@1/64
T1_SYNC_EXT_OFF & //�N���b�N��������OFF
T1_SOURCE_INT, //�N���b�N���F�����N���b�N
24999 //200msec �� 200�~1000�~�i32MHz/4MHz)/64=25000
); //PR1 = 25000 -1 = 24999
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"ADC Start !!%u",Count);//arguement���Ȃ��ƒx�� C30�̃o�O�H
lcd_str(Buf); //�t���\��
delay_ms(1000);
ConfigIntTimer1(T1_INT_PRIOR_5 & T1_INT_ON); //�����݃��x���T�@�^�C�}�P������ON
EnableIntT1; //��������
while(1) //�^�C�}�����݂�҂�
{
}
CloseTimer1();
return 0;
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����łɕύX�������̂ł��B
//*************************************************************************
#include "p24FJ64GA002.h"
#define Clock 32000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATBbits.LATB1 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATBbits.LATB0 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C30.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C30�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C30�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C30.h"
unsigned int _1usec; // 1��sec�҂ɕK�v�ȃE�F�C�g��
unsigned int _50usec; //50��sec�҂ɕK�v�ȃE�F�C�g��
unsigned long N_msec; // 1msec�҂ɕK�v�ȃE�F�C�g��
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
__delay32(_1usec); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
__delay32(_1usec); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
__delay32(2*N_msec); // 2msec�҂�
else
__delay32(_50usec); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
// __delay32(15*N_msec); //15msec�E�F�C�g
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
_1usec =(unsigned int)( Clock / 4000000); // 1��sec�ɗv����E�F�C�g��
//__delay32(N) �F N��11�ȉ��̏ꍇ�ł�11��E�F�C�g
_50usec = (unsigned int)(Clock / 4000000 * 50); //50��esc�ɗv����E�F�C�g��
N_msec = (unsigned long int)(Clock / 4000); // 1msec�ɗv����E�F�C�g��
// = Clock / 4000000*1000
__delay32(20*N_msec); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(5*N_msec); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
__delay32(N_msec); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
�@�t���̉��Ɏʂ��Ă���̂�AN0�̒[�q�d����\�����Ă���f�W�^���e�X�^�[�ł��B
���@C32�R���p�C���@PIC32MX��
�@�@���͓d�����t���ɕ\������B
�@PIC32MX460F512L����AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B
�@������i�d�l��
�@�@�E�@PIC32MX460F512L��AN0�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{3.3V�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���100msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@������i��H�}��
�@�@PIC32MX460F512L�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�.
�@�@�@�@�@�@�@�@�@�@�E�@QFP��PIC32MX460F512L�́A�}�C�N���`�b�v����J���p�^�[�Q�b�g�{�[�hExplore 16��CPU�{�[�h�Ƃ��āA�̔�����Ă���
�@�@�@�@�@�@�@�@�@�@�@�@PIM�iPlug in Moduke�j�Ɏ�������Ă�����̂��g���Ă��܂��B
�@�@�@�@�@�@�@�@�@�@�E�g�p���Ă��郆�j�o�[�T���L�o��������̃��j�o�[�T���L�o���ł��B
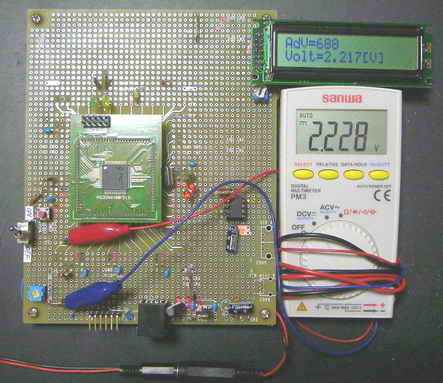
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�@�@�@�@AD�R���o�[�^�ǂݍ��ݥ�l�̉t���\��
//�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@PIC32MX460F512L�@
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
#include <plib.h> // PIC32 peripheral library
//for SYSTEMConfigPerformance()
#include "1lcd_lib_C32.h"
// �R���t�B�M�����[�V�����ݒ�
// CPU=80MHz Peri=80MHz,HS+PLL,Divider=1/2,PLL=x20,WDT=Off
#pragma config FNOSC=PRIPLL, POSCMOD=HS, FPLLIDIV=DIV_2
#pragma config FPLLMUL=MUL_20, FPBDIV=DIV_1, FPLLODIV=DIV_1
#pragma config FWDTEN=OFF, ICESEL=ICS_PGx2
char Buf[17]; //������̃o�b�t�@�[�p���W�X�^
void AdcFunc(void) // AD�ϊ��ǂݎ��@���@�t���\��
{
float Volt;
unsigned int I;
unsigned int F;
unsigned int AdcValue;
AD1CON1bits.SAMP =1; //�T���v�����O�J�n
while(!AD1CON1bits.DONE); //AD�ϊ��I���t���O�����i�P�ɂȂ�܂Łj�҂�
AdcValue = ADC1BUF0; //ADC1��AN0�̃o�b�t�@�[����AD�ϊ����ʂ�Ǎ���
lcd_clear(); //�S����
sprintf(Buf,"AdV=%u",AdcValue); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Volt =(float)AdcValue/1024*3.3;
I = (unsigned int) Volt;
F = (unsigned int)(( Volt - I)*1000);
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"Volt=%u.%u[V]",I,F); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
}
void __ISR(4,ipl2)T1Hander(void) //�^�C�}�P�����@100msec��
{
mT1ClearIntFlag(); //�t���O�N���A
AdcFunc(); // AD�ϊ��ǂݎ��@���@�t���\��
}
int main(void)
{
SYSTEMConfigPerformance(80000000); // �V�X�e���œK��
LATBbits.LATB0 = 1; //RB0/AN0�@����̓|�[�g�ɐݒ�
TRISE = 0; //E�|�[�g���o�̓��[�h�ɐݒ�
//AD1CON1���W�X�^�̐ݒ�
AD1CON1bits.ON = 1; //A/D�R���o�[�^���W���[���L��
AD1CON1bits.FRZ = 0; //�f�o�b�O���[�h�ɉ����Ă�����p��
AD1CON1bits.SIDL = 0; //�A�C�h�����[�h�������W���[������p��
AD1CON1bits.FORM2 = 0; //AD1CON1bits.FORM2-AD1CON1bits.FORM0�̃Z�b�g�ŏo�̓f�[�^�`���w��@���@000�F16�r�b�g�����Ȃ������`��
AD1CON1bits.FORM1 = 0; //011:�����t�Œ�16�r�b�g�����@010�F�Œ菬��16�r�b�g�@001�F�����t������16�r�b�g�@000�F16�r�b�g�����Ȃ�����
AD1CON1bits.FORM0 = 0; //111�F�����t32�r�b�g�Œ菬���@110�F32�r�b�g�Œ菬���@101�F�����t32�r�b�g�����@100��32�r�b�g�����Ȃ�����
//���@Michrochip �f�[�^�V�[�gDS61104 �ł�000�A100��Integer�ƂȂ��Ă��邪Unsigned Integer�̌�A�ł���B�@
AD1CON1bits.SSRC2 = 1; //AD1CON1bits.SSRC2-AD1CON1bits.SSRC0 �̃Z�b�g�Ńg���K�[�\�[�X���w��
AD1CON1bits.SSRC1 = 1; //111�F�@�����J�E���^�ŃT���v�����O���I�������ϊ����J�n����
AD1CON1bits.SSRC0 = 1; //�i�Q�l�j000�F�@SAMP�r�b�g�ŃT���v�����O���I�����ϊ����J�n����
AD1CON1bits.CLRASAM = 0;//AD�ϊ����荞�ݎ��̕ϊ���~�@0�F���̕ϊ��l�ŃI�[�o�[���C�g
AD1CON1bits.ASAM = 0; //SAMP�r�b�g�̃Z�b�g�ŃT���v�����O���J�n����B�i�Q�l�j1�F�@�����J�n�i�O�̕ϊ��I���シ���T���v�����O���J�n����j
AD1CON1bits.SAMP = 0; //�T���v�����O��~
//AD1CON2���W�X�^�̐ݒ�
AD1CON2bits.VCFG2 = 0; //���t�@�����X�I��//AD1CON2bits.VCFG2 - AD1CON2bits.VCFG0�iVCFG��2�F0���j��3�r�b�g�ŃZ�b�g
AD1CON2bits.VCFG1 = 0; //000�F���t�@�����X�d���@���@Vdd�@-Vss
AD1CON2bits.VCFG0 = 0; //�i�Q�l�j001�F���t�@�����X�d�� �� �O������ -�@Vss ��
AD1CON2bits.OFFCAL = 0; //�r�����[�h�ݒ�@0�F�T���v���z�[���h����SHA�̓��͂�AD1CHS���W�X�^��AD1CSSL���W�X�^�Ő��䂳���
AD1CON2bits.CSCNA = 1; //�}���`�v���N�TMUXA�ł̃X�L�����F�@����
AD1CON2bits.SMPI3 = 0; //���荞�݃^�C�~���O�@AD1CON2bits.SMPI3 - AD1CON2bits.SMPI0�iSMPI<3:0>�j��4�r�b�g�ŃZ�b�g
AD1CON2bits.SMPI2 = 0; //0000�F�@AD�ϊ��������̊��荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI1 = 0; //(�Q�l�j0011�F�@4�T���v����AD�ϊ��I���� ���荞�ݔ����i���荞�ݗL���̏ꍇ�j
AD1CON2bits.SMPI0 = 0; //
AD1CON2bits.BUFM = 0; //�o�b�t�@�[��1��16���[�h�o�b�t�@�Ƃ���B�@�i�Q�l�j1�F�@2�g��8���[�h�o�b�t�@�[�Ƃ���
AD1CON2bits.ALTS = 0; //���MUXA����̓}���`�v���N�T�ɂ���@�i�Q�l�j1�F�@MUXA,MUXB�����݂ɂ���
//AD1CON3���W�X�^�̐ݒ�
AD1CON3bits.ADRC = 0; //AD�ϊ��N���b�N���I��//0�F�@PBCLK�iPeripheral Bus Clock)�@�i�Q�l�j1�F�@A/D����RC�N���b�N
AD1CON3bits.SAMC4 = 1; //AD1CON3bits.SAMC4 - AD1CON3bits.SAMC0(SAMC<4:0>)��5�r�b�g�ŃZ�b�g
AD1CON3bits.SAMC3 = 1; //�A�N�C�W�V�����^�C���iTad�i�N���b�N�����j�~N�j�ݒ�i�z�[���h�L���p�V�^�[�d���v���ԁj
AD1CON3bits.SAMC2 = 1; //1111�F 31Tad
AD1CON3bits.SAMC1 = 1; //�i�Q�l�j0001�F 1Tad �@0010�F 2Tad �@�@�@0011�F 3Tad�@�@�E�E�E�E
AD1CON3bits.SAMC0 = 1; //
AD1CON3bits.ADCS7 = 0; //AD�ϊ����Ԃ̐ݒ�/AD1CON3bits.ADCS7 -�@AD1CON3bits.ADCS0�iADCS��7�F0���j��8�r�b�g�ŃZ�b�g
//AD�ϊ������t���OAD1CON1bits.DONE�ɂ��AAD�ϊ����������m����ꍇ�͐ݒ�s�v
AD1CON3bits.ADCS6 = 0; //AD�ϊ������܂ł̂̃N���b�N���I���r�b�g
AD1CON3bits.ADCS5 = 0; //0000 0101�F�@1Tad = 6Tpb �iTpb�F�@PBCLK�̎����j
AD1CON3bits.ADCS4 = 0; //�i�Q�l�j 0000 0000�F�@1Tad�@=�@2Tpb
AD1CON3bits.ADCS3 = 0; // 0000 0001�F�@1Tad = 3Tpb
AD1CON3bits.ADCS2 = 1; // 0000 0010�F�@1Tad�@=�@4Tpb
AD1CON3bits.ADCS1 = 0; // �@�@�E�E�E�E�@�@�@�@
AD1CON3bits.ADCS0 = 1; //�@�@�@�@�@1111 1111�F 1Tad = 512Tpb
//AD1CHS���W�X�^�̐ݒ�@//SHA�́{�[�q�Ɓ[�[�q�ւ̐ڑ��i�|�[�g�j�ݒ�
AD1CHSbits.CH0NB = 0; //�}���`�v���N�TMUXB�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SB3 = 0; //AD1CHSbits.CH0SB3 - AD1CHSBbits.CH0SB0�i��CH0SB��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SB2 = 0; //�}���`�v���N�TMUXB�̐������͑I��
AD1CHSbits.CH0SB1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SB0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
AD1CHSbits.CH0NA = 0; //�}���`�v���N�TMUXA�p�������͑I���r�b�g�F�@VR- �i�Q�l�j1�F�@AN1
AD1CHSbits.CH0SA3 = 0; //AD1CHSbits.CH0SA3 - AD1CHSbits.CH0SA0�i��CH0SA��3�F0���j��4�r�b�g�ŃZ�b�g
AD1CHSbits.CH0SA2 = 0; //�}���`�v���N�TMUXA�̐������͑I��
AD1CHSbits.CH0SA1 = 0; //0000�F�@AN0
AD1CHSbits.CH0SA0 = 0; //�i�Q�l�j0001�F�@AN1�@�@0011�@AN2�@�@�@�@�D�D�D�D�@�@1111�F�@AN15
//AD1PCFG���W�X�^�̐ݒ�@//�@�|�[�g�̱�۸ރf�W�^���@
//�@���f�o�C�X���Z�b�g�ł͑S�r�b�g0�ƂȂ邽�߃f�t�H���g�ł̓A�i���O���͂ƂȂ�̂Ńf�W�^���Ŏg�����d�s���́A�R���t�B�O���[�V�����Ńf�W�^���ݒ肪�K�v!!�@
AD1PCFGbits.PCFG15 = 1;//RB15/AN15�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG14 = 1;//RB14/AN14�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG13 = 1;//RB13/AN13�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG12 = 1;//RB12/AN12�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG11 = 1;//RB11/AN11�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG10 = 1;//RB10/AN10�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG9 = 1;//RB9/AN9�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG8 = 1;//RB8/AN8�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG7 = 1;//RB7/AN7�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG6 = 1;//RB6/AN6�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG5 = 1;//RB5/AN5�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG4 = 1;//RB4/AN4�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG3 = 1;//RB3/AN3�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG2 = 1;//RB2/AN2�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG1 = 1;//RB1/AN1�A�i���O����or�f�W�^�����͑I���F�@�f�W�^���@�i�Q�l�j0�F�@�A�i���O
AD1PCFGbits.PCFG0 = 0;//RB0/AN0�A�i���O����or�f�W�^�����͑I���F�@�A�i���O�@�i�Q�l�j1�F�@�f�W�^��
// AD1CSSL���W�X�^�̐ݒ�
//�ǂݍ��ރ`�����l���i���͒[�q�j���Z�b�g����
AD1CSSLbits.CSSL15 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL14 = 0; //AN15��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL13 = 0; //AN13��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL12 = 0; //AN12��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL11 = 0; //AN11��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL10 = 0; //AN10��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL9 = 0; //AN9��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL8 = 0; //AN8��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL7 = 0; //AN7��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL6 = 0; //AN6��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL5 = 0; //AN5��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL4 = 0; //AN4��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL3 = 0; //AN3��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL2 = 0; //AN2��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������
AD1CSSLbits.CSSL1 = 0; //AN1��MUXA�ŃX�L�������Ȃ��@�i�Q�l�j1�F�@�X�L��������@
AD1CSSLbits.CSSL0 = 1; //AN0��MUXA�ŃX�L��������@�i�Q�l�j0�F�@�X�L�������Ȃ��@�@�@�@�@���g�p����AN0�̃`�����l�������ǂݍ���
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_clear(); // �S����
sprintf(Buf,"ADC Start !!");//C30�Ƃ͈قȂ�Aarguement �s�v
lcd_str(Buf); //�t���\��
OpenTimer1( T1_ON | // �^�C�}�P�@�C�l�[�u���@ //T1_OFF�@�� �^�C�}1�@�f�B�Z�[�u��
T1_SOURCE_INT | //�N���b�N�\�[�X�F�C���^�[�i���@//T1_SOURCE_EXT�@���@�O�����U��
T1_PS_1_256, //�v���X�P�[���@1/256�@�@�@//1/1�A1/2�A1/4�A1/8�A1/16�A1/32�A1/64�A1/256
31249 //PRx�l�F�@�@T0[msec] = 1000/80000000*256*31249�@=99.9968 msec
//PICMX32��1�N���b�N��1����
//���� T0�msec�n�@=�@1/Fosc�@�~�@�v���X�P�[���̋t���@�~ PRx�l
);
ConfigIntTimer1(T1_INT_ON | T1_INT_PRIOR_2); //�^�C�}�P����ON�A���荞�݃��x���Q
INTEnableSystemMultiVectoredInt(); //���荞�݂��}���`�x�N�^���[�h�ŋ���
while(1)
{
}
}
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <proc/p32mx460f512l.h> //PIC32MX460F512L
#define Clock 80000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATEbits.LATE7 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATEbits.LATE6 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATEbits.LATE5 //LCD��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATEbits.LATE4 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATEbits.LATE3 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATEbits.LATE2 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(Clock/20000000)*usec;
do
{
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�����쌋�ʁ�
�@�t���̉��Ɏʂ��Ă���̂�AN0�̒[�q�d����\�����Ă���f�W�^���e�X�^�[�ł��B
���@XC32�R���p�C���@PIC32MZ��
�@�@PIC32MZ��AD���W���[���́@PIC32MX�Ƃ͂��̍\�����啝�ɕύX�ɂȂ��Ă��܂��B�@���ׂ̈��@revision 5 �ɂȂ��Ă悤�₭�@�����悤�ɂȂ����悤�ł��B
�@�V���R���`�b�v�����邱�Ƃ́@�͂��Ŏv�����͂邩�ɓ���悤�ł��B
�@PIC32MZ2048ECH100�̓���AD�R���o�[�^����AD�ϊ��l��Ǎ��݁A�l���t���ɕ\����������Љ�܂��B
�@������i�d�l��
�@�@�E�@PIC32MZ2048ECH100��AN25�[�q�������AD�ϊ���������d����ǂݍ���
�@�@�E�@���t�@�����X�d���́{3.3V�iPIC�̓d���d���j�Ƃ���B
�@�@�E�@�t���ɂ͈ȉ���100msec���ɕ\������B
�@�@�@�@�@�@�@�P�s�ځ@�c�c�@AD�ϊ��l
�@�@�@�@�@�A�@�Q�s�ځ@�c�c�@���͓d���i�P�ʁF�{���g�j
�@�@�E�@�J�����@�c�c�@ Harmony: ver. 1.02�@�@�@XC32: ver.1.34 �@�@�@MPLABX: ver.2.26�@�@�@�@PIC32MZ2048ECH100:
revision 5
�@������i��H�}��
�@�@PIC32MZ2048ECH100�̏ꍇ�̉�H�}���ȉ��ɂ��߂��܂��B�i����H�}��PDF�t�@�C���j
������i�O�ρ����L�̎ʐ^�ɂ͏�L��H�}�ɂ͂Ȃ��A�܂��{�e�[�}�ƊW�̂Ȃ����i�����X�ʂ��Ă��܂�
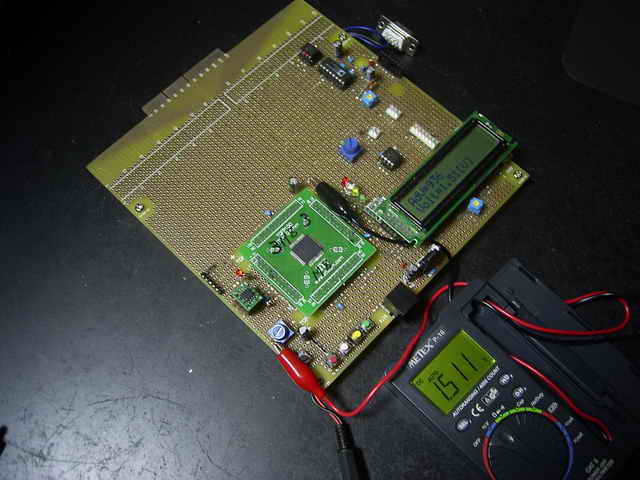
�@�@�@�@�@
�@�@�@�@�@�@�@�@�@�@
�@���v���O�����၄
//�ȉ��A�@main.c
//--------------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Project Main Source File
Company:
Microchip Technology Inc.
File Name:
main.c
Summary:
This file contains the "main" function for an MPLAB Harmony project.
Description:
This file contains the "main" function for an MPLAB Harmony project. The
"main" function calls the "SYS_Initialize" function to initialize the state
machines of all MPLAB Harmony modules in the system and it calls the
"SYS_Tasks" function from within a system-wide "super" loop to maintain
their correct operation. These two functions are implemented in
configuration-specific files (usually "system_init.c" and "system_tasks.c")
in a configuration-specific folder under the "src/system_config" folder
within this project's top-level folder. An MPLAB Harmony project may have
more than one configuration, each contained within it's own folder under
the "system_config" folder.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
//Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <stddef.h> // Defines NULL
#include <stdbool.h> // Defines true
#include <stdlib.h> // Defines EXIT_FAILURE
#include "system/common/sys_module.h" // SYS function prototypes
// *****************************************************************************
// *****************************************************************************
// Section: Main Entry Point
// *****************************************************************************
// *****************************************************************************
int main ( void )
{
/* Initialize all MPLAB Harmony modules, including application(s). */
SYS_Initialize ( NULL );
while ( true )
{
/* Maintain state machines of all polled MPLAB Harmony modules. */
SYS_Tasks ( );
}
/* Execution should not come here during normal operation */
return ( EXIT_FAILURE );
}
/*******************************************************************************
End of File
*/
//�ȉ��Aapp.c
//---------------------------------------------------------------------------------------------------
/*******************************************************************************
MPLAB Harmony Application Source File
Company:
Microchip Technology Inc.
File Name:
app.c
Summary:
This file contains the source code for the MPLAB Harmony application.
Description:
This file contains the source code for the MPLAB Harmony application. It
implements the logic of the application's state machine and it may call
API routines of other MPLAB Harmony modules in the system, such as drivers,
system services, and middleware. However, it does not call any of the
system interfaces (such as the "Initialize" and "Tasks" functions) of any of
the modules in the system or make any assumptions about when those functions
are called. That is the responsibility of the configuration-specific system
files.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "app.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
#include "adc_p32mz2048ech100.h"
#include "adcp_p32mz2048ech100.h"
#include "1lcd_lib_C32.h"
#define ADC_ID_1 0
int delay_Clock = 200000000; //200MHz
char Buf[17]; //1�t���\���o�b�t�@�[
extern int Flag_Adc;
void delay_us(volatile unsigned int usec) //1��sec�x��
{
volatile int count;
count = (int)(delay_Clock/20000000)*usec;
do //�����@at�@200MH (Clock=200000000)
{ //delay_us(1000)�F1000.4��sec delay_us(100)�F100.6��sec delay_us(10):10.5��sec�@�@delay_us(1)�F1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void delay_ms(volatile unsigned int msec) //1msec�x��
{
volatile unsigned int i; //�����Fat200MH (Clock=200000000)//delay_ms(1)�F 1.0006msec delay_ms(100)�F100.04msec
for(i=0; i<msec; i++)
delay_us(1000);
}
void AdcFunc(void)
{
unsigned int AdcValue;
float Volt;
int I,F;
//PLIB_ADCP_IndividualTrigger(ADCP_ID_1, ADCP_AN4);
AD1CON3bits.RQCONVRT = 1; //�ʓ���AD�ϊ��J�n //Individual ADC Input Conversion Request bit
//AdcValue = PLIB_ADCP_ResultGet( ADC_ID_1, ADCP_AN4 ); //AN25�p�o�b�t�@����ϊ��l�iunsigned int) �Ǐo��
while(!AD1DSTAT1bits.ARDY4); //AN4�̕ϊ��I���҂�
AdcValue = AD1DATA4; //AN4�p�o�b�t�@����ϊ��l�iunsigned int) �Ǐo��
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"AdV=%u ",AdcValue); //�o�b�t�@�[�ɕ�������Z�b�g
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Volt =(float)AdcValue/2048*3.3;
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf,"Volt=%.2f[V]",Volt); //������Ƃ��ăo�b�t�@�[�Ɏ��[
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
Flag_Adc = 0;
}
// *****************************************************************************
// *****************************************************************************
// Section: Global Data Definitions
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* Application Data
Summary:
Holds application data
Description:
This structure holds the application's data.
Remarks:
This structure should be initialized by the APP_Initialize function.
Application strings and buffers are be defined outside this structure.
*/
APP_DATA appData;
// *****************************************************************************
// *****************************************************************************
// Section: Application Callback Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary callback funtions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Local Functions
// *****************************************************************************
// *****************************************************************************
/* TODO: Add any necessary local functions.
*/
// *****************************************************************************
// *****************************************************************************
// Section: Application Initialization and State Machine Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void APP_Initialize ( void )
Remarks:
See prototype in app.h.
*/
void APP_Initialize ( void )
{
/* Place the App state machine in its initial state. */
appData.state = APP_STATE_INIT;
/* TODO: Initialize your application's state machine and other
* parameters.
*/
//�t���|�[�g���o�͐ݒ�-----------------------------
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 15 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 14 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 13 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_B, 12 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 10 );
PLIB_PORTS_PinDirectionOutputSet( PORTS_ID_0, PORT_CHANNEL_A, 9 );
/*
TRISBbits.TRISB15 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB14 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB13 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISBbits.TRISB12 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA10 = 0; //�L�����N�^�t���|�[�g�ݒ�
TRISAbits.TRISA9 = 0; //�L�����N�^�t���|�[�g�ݒ�
*/
//ADC���W���[���L�����u���[�V����
PLIB_ADCP_Configure(ADCP_ID_1, ADCP_VREF_VREFP_VREFN, false, false, false, //Reference voltage set to VREF positive and VREF negative
//boostVref:false//fractionalOutputOn:false//stopInIdle:false
ADCP_CLK_SRC_SYSCLK, (96000000/ 16000000 / 2), 32, 0, 32); //ADC TAD clock�F96MHz//Desired TAD clock Frequency:16MHz
//oversampleDigFilterSamTime:32//earlyIntEnable:0//class2and3SampleTime:32
AD1CAL1 = 0xF8894530; // Use software calibration values into AD1CALx
AD1CAL2 = 0x01E4AF69;
AD1CAL3 = 0x0FBBBBB8;
AD1CAL4 = 0x000004AC;
AD1CAL5 = 0x02000002;
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH0, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH0���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH1, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH1���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH2, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH2���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH3, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH3���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH4, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH4���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_SHModeSelect(ADCP_ID_1, ADCP_SH5, ADCP_SH_MODE_DIFFERENTIAL_UNIPOLAR);//SH5���W���[���������A���v���[�h�ɐݒ�
PLIB_ADCP_ChannelScanConfigure(ADCP_ID_1, 0, 0, ADCP_SCAN_TRG_SRC_TMR3_MATCH);
PLIB_ADCP_Enable(ADCP_ID_1); //ADC�L�����A�@�V���R���`�b�v�L�����u���[�V���������s//Turn on the ADC. Wait for silicon ADC self cal to finish
while(!PLIB_ADCP_ModuleIsReady(ADCP_ID_1)); //ADC����������҂�
//�A�v���P�[�V�����ł�ADC�ݒ�
//PLIB_ADCP_Disable(ADC_ID_1);
AD1CON1bits.ADCEN = 0;
//PLIB_ADCP_SHModeSelect(ADC_ID_1, ADCP_SH5, ADCP_SH_MODE_SINGLE_ENDED_UNIPOLAR);
AD1IMODbits.SH5MOD = 0b00; //No5SH���@�V���O���G���h���́A�o�̓��j�|�[���G���R�[�h�� unsigned int�ɐݒ�
//PLIB_ADC_InputSelectPositive(ADC_ID_1, ADC_INPUT_POSITIVE_AN4);//���T�|�[�g��
AD1CON3bits.ADINSEL = 4; //AD�ϊ����̓|�[�g�@AN4�ݒ�
//PLIB_PORTS_PinDirectionInputSet( PORTS_ID_0, PORT_CHANNEL_B, 4 );
TRISBbits.TRISB4 = 1; //RB4�@���̓��[�h�ݒ�
//PLIB_PORTS_PinModeSelect(PORTS_ID_0, PORTS_ANALOG_PIN_4, PORTS_PIN_MODE_ANALOG);
ANSELBbits.ANSB4 = 1; //RB4/AN4 �A�i���O���[�h
//PLIB_ADC_VoltageReferenceSelect(ADC_ID_1, ADC_REFERENCE_VDD_TO_AVSS ); ? //���t�@�����X�d���ݒ�F�@Vrefh = AVdd, Vrefl = AVss//���T�|�[�g��
AD1CON3bits.VREFSEL = 0b000; //���t�@�����X�d���ݒ�F�@Vrefh = AVdd, Vrefl = AVss
//PLIB_ADC_ConversionClockSourceSelect(ADC_ID_1, ADC_CLOCK_SOURCE_SYSTEM_CLOCK); //���T�|�[�g��
AD1CON2bits.ADCSEL = 0b01; //AD�ϊ��N���b�N�\�[�X�F�V�X�e���N���b�N(200MHz) //ADC Clock Source //System Clock
//�O�����͂̏ꍇ�@0b10: REFCLK3(PPS) //���������N���b�N(8MHz)�̏ꍇ0b11: FRC //0b00 = Reserved
// PLIB_ADC_ConversionClockSet(ADC_ID_1, SYS_CLK_FREQUENCY, 19); //This function sets the ADC module conversion clock prescaler//���T�|�[�g��
AD1CON2bits.ADCDIV = 19; //AD�ϊ��N���b�N������F1/20�@�@�ϊ����g���F200MHz --> 10MHz (Tad = 100nsec) // 1MHz < 10MHz < 16MHz �́@OK
//PLIB_ADC_SampleAcqusitionTimeSet(ADC_ID_1, 50 ); //�T���v�����ԁi�A�N�C�W�V�������ԁj50Tad//���T�|�[�g��
AD1CON2bits.SAMC = 50; //�T���v�����ԁi�A�N�C�W�V�������ԁj50Tad = 100nsec x 50 = 5000nec = 5��sec
//PLIB_ADCP_Enable(ADC_ID_1); //PLIB_ADC_Enable(ADC_ID_1); //ADC ���W���[���@�L�� // Enable the ADC module
AD1CON1bits.ADCEN = 1; //ADC ���W���[���@�L��
lcd_init(); // LCD������
lcd_cmd(0b00001100); // �J�[�\��:OFF �u�ݸ:OFF
lcd_cmd(0x80); //1�ڂ̐擪��
sprintf(Buf,"AD converter ");//
lcd_str(Buf); //�t���\��
lcd_cmd(0xC0); //�Q�s�ڂ̐擪��
sprintf(Buf," Start !! "); //
lcd_str(Buf); // �J�n���b�Z�[�W1�s�ڕ\��
delay_ms(2000);
}
/******************************************************************************
Function:
void APP_Tasks ( void )
Remarks:
See prototype in app.h.
*/
void APP_Tasks ( void )
{
/* Check the application's current state. */
switch ( appData.state )
{
/* Application's initial state. */
case APP_STATE_INIT:
{
if(Flag_Adc == 1)AdcFunc(); //�����ݔ�����
break;
}
/* TODO: implement your application state machine.*/
/* The default state should never be executed. */
default:
{
/* TODO: Handle error in application's state machine. */
break;
}
}
}
/*******************************************************************************
End of File
*/
//�ȉ��Asystem_init.c
//---------------------------------------------------------------------------------------------------
/*******************************************************************************
System Initialization File
File Name:
system_init.c
Summary:
This file contains source code necessary to initialize the system.
Description:
This file contains source code necessary to initialize the system. It
implements the "SYS_Initialize" function, configuration bits, and allocates
any necessary global system resources, such as the systemObjects structure
that contains the object handles to all the MPLAB Harmony module objects in
the system.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2013-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED AS IS WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include "system_config.h"
#include "app.h"
#include "system_definitions.h"
// ****************************************************************************
// ****************************************************************************
// Section: Configuration Bits
// ****************************************************************************
// ****************************************************************************
//-----------------------------------------------------------------------
//DEVCFG0���W�X�^
#pragma config EJTAGBEN = NORMAL
#pragma config DBGPER = ALLOW_PG2
#pragma config FSLEEP = OFF
#pragma config FECCCON = OFF_UNLOCKED
#pragma config BOOTISA = MIPS32
#pragma config TRCEN = OFF
#pragma config ICESEL = ICS_PGx2
#pragma config JTAGEN = OFF //JTAG �|�[�g Disable
#pragma config DEBUG = OFF
//----------------------------------------------------------------------
//DEVCFG1���W�X�^
#pragma config FNOSC = SPLL //PLL��H(�V�X�e��PLL�j�I�� //�V�X�e�����U��H //����FRC(8MHz�j�I���̏ꍇ�FFNOSC = FRCDIV //Oscillator Selection Bits (Fast RC Osc w/Div-by-N (FRCDIV))
#pragma config FDMTEN = OFF //�f�b�h�}���^�C�}�@OFF (Deadman Timer is disabled)
//#pragma config DMTINTV = WIN_127_128 // DMT Count Window Interval (Window/Interval value is 127/128 counter value)
#pragma config FSOSCEN = OFF // �����U��OFF //Secondary Oscillator Enable (Disable SOSC)
#pragma config IESO = OFF //�E�F�C�N�A�b�v����2�i���x�X�^�[�g�A�b�v�@// Internal/External Switch Over (Disabled)
#pragma config POSCMOD = HS //HS: �n�C�X�s�[�h���]�l�[�^���[�h // HS(High Speed Resonator Operation) Oscillator mode selected
//EC: �O�����U�� //EC(External Clock Input Operation) mode selected // Primary Oscillator Configuration (Primary osc disabled)
#pragma config OSCIOFNC = OFF //OSCCO�s���o�͖���
#pragma config FCKSM = CSECME //�N���b�N���U�F�ؑy�у��j�^�L�� //�唭�U�편�ׂ�FRC(�����������U��j�ɐؑ� //FSCM�iFail Safe Clock Monitor)����
#pragma config FWDTEN = OFF // �E�H�b�`�h�b�N�^�C�}�@OFF //Watchdog Timer Disable
//#pragma config WDTPS = PS1048576 // Watchdog Timer Postscaler (1:1048576)
//#pragma config WDTSPGM = STOP // Watchdog Timer Stop During Flash Programming (WDT stops during Flash programming)
//#pragma config WINDIS = NORMAL // Watchdog Timer Window Mode (Watchdog Timer is in non-Window mode)
//#pragma config FWDTWINSZ = WINSZ_25 // Watchdog Timer Window Size (Window size is 25%)
//--------------------------------------------------------------------------------------------------------------------
// DEVCFG2���W�X�^
//�V�X�e���N���b�N�F200MHz
//�y���t�F�������g���F//default: 100MHz //PBxDIV��8�n�����ɐݒ�ύX��
//PBxDIV: PERIPHERAL BUS CLOCK DIVISOR CONTROL ���W�X�^��PBDIV<6:0>: Peripheral Bus Clock Divisor Control �r�b�g�Őݒ�
#pragma config FPLLRNG = RANGE_13_26_MHZ //PLL Input���g�����͔͈͐ݒ�// System PLL Input Range (13-26 MHz Input) �@//24MHz��
#pragma config FPLLIDIV = DIV_3 //PLL���͑��ł̕����F 1/3 // PLL�@Input���g�� = 24MH���@���@3�@���@8MHz // System PLL Input Divider (1x Divider)
//#pragma config FPLLICLK = PLL_POSC //�唭�U��H�I���@//����FRC�i8MHz�j�̏ꍇ��FPLLICLK = PLL_FRC// System PLL Input Clock Selection (POSC is input to the System PLL)
#pragma config FPLLICLK = PLL_FRC //�����������U��I�� //�������@�o�O�L�@�唭�U��H�I���̎��AFPLLICLK = PLL_POSC�ł͂Ȃ�FPLLICLK = PLL_FRC��I������B(at ver.1.33 XC32)
#pragma config FPLLMULT = MUL_50 //PLL�{���F50�{�@//8MHz x 50 = 400MHz //System PLL Multiplier (PLL Multiply by 50)
#pragma config FPLLODIV = DIV_2 //PLL�o�͑��ł̕����F 1/2 //�V�X�e���N���b�N�@=�@400MHz ���@2�@=�@200MH��
#pragma config UPLLFSEL = FREQ_24MHZ //USB��PLL���͂��@24MHz��12MHz�ɕϊ��@// USB PLL Input Frequency Selection (USB PLL input is 12 MHz)
#pragma config UPLLEN = ON //USB��PLL�ϊ��F�C�l�[�u���@// USB PLL Enable (USB PLL is enabled)
//--------------------------------------------------------------------------------------------------------------------------
//DEVCFG3���W�X�^
#pragma config USERID = 0xffff
#pragma config FMIIEN = ON
#pragma config FETHIO = ON
#pragma config PGL1WAY = ON
#pragma config PMDL1WAY = ON
#pragma config IOL1WAY = ON
#pragma config FUSBIDIO = ON
/*** BF1SEQ0 ***/
#pragma config TSEQ = 0xffff
#pragma config CSEQ = 0xffff
// *****************************************************************************
// *****************************************************************************
// Section: Library/Stack Initialization Data
// *****************************************************************************
// *****************************************************************************/
// *****************************************************************************
// *****************************************************************************
// Section: Driver Initialization Data
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
// Section: System Data
// *****************************************************************************
// *****************************************************************************
/* Structure to hold the object handles for the modules in the system. */
SYSTEM_OBJECTS sysObj;
// *****************************************************************************
// *****************************************************************************
// Section: Module Initialization Data
// *****************************************************************************
// *****************************************************************************
// *****************************************************************************
/* System Clock Initialization Data
*/
const SYS_CLK_INIT sysClkInit =
{
.moduleInit = {0},
.systemClockSource = SYS_CLK_SOURCE,
.systemClockFrequencyHz = SYS_CLK_FREQ,
.waitTillComplete = true,
.secondaryOscKeepEnabled = true,
.onWaitInstruction = SYS_CLK_ON_WAIT,
};
/*** System Device Control Initialization Data ***/
const SYS_DEVCON_INIT sysDevconInit =
{
.moduleInit = {0},
};
// *****************************************************************************
// *****************************************************************************
// Section: Static Initialization Functions
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void DRV_TMR0_Initialize(void)
Summary:
Initializes Timer Driver Instance 0
Remarks:
*/
void DRV_TMR0_Initialize(void)
{
/* Setup TMR0 Instance */
PLIB_TMR_Stop(TMR_ID_1); /* Disable Timer */
PLIB_TMR_ClockSourceSelect(TMR_ID_1, TMR_CLOCK_SOURCE_PERIPHERAL_CLOCK); /* Select clock source */
PLIB_TMR_PrescaleSelect(TMR_ID_1, TMR_PRESCALE_VALUE_256); /* Select prescalar value */
PLIB_TMR_Mode16BitEnable(TMR_ID_1); /* Enable 16 bit mode */
PLIB_TMR_Counter16BitClear(TMR_ID_1); /* Clear counter */
PLIB_TMR_Period16BitSet(TMR_ID_1, 0); /*Set period */
/* Setup Interrupt */
PLIB_INT_SourceEnable(INT_ID_0, INT_SOURCE_TIMER_1);
PLIB_INT_VectorPrioritySet(INT_ID_0, INT_VECTOR_T1, INT_PRIORITY_LEVEL1);
PLIB_INT_VectorSubPrioritySet(INT_ID_0, INT_VECTOR_T1, INT_SUBPRIORITY_LEVEL0);
PLIB_TMR_Period16BitSet(TMR_ID_1,9766); //5 nsec x20 x 9766 x 256 =250.0096msec = 250msec
PLIB_TMR_Start(TMR_ID_1); //�^�C�}�X�^�[�g
}
// *****************************************************************************
// *****************************************************************************
// Section: System Initialization
// *****************************************************************************
// *****************************************************************************
/*******************************************************************************
Function:
void SYS_Initialize ( SYS_INIT_DATA *data )
Summary:
Initializes the board, services, drivers, application and other modules.
Remarks:
See prototype in system/common/sys_module.h.
*/
void SYS_Initialize ( void* data )
{
/* Core Processor Initialization */
SYS_CLK_Initialize(&sysClkInit);
sysObj.sysDevcon = SYS_DEVCON_Initialize(SYS_DEVCON_INDEX_0, (SYS_MODULE_INIT*)&sysDevconInit);
SYS_DEVCON_PerformanceConfig(SYS_DEVCON_SYSTEM_CLOCK);
SYS_DEVCON_SystemUnlock();
PB3DIVbits.PBDIV = 0x13; //19: �^�C�}1�p�y���t�F�����N���b�N�F�@1/20 --> 10MHz�i = 200MHz/20) //PBCLK3 is SYSCLK divided by 10
// PB3DIVbits.PBDIV = 0x03; //PBCLK3 is SYSCLK divided by 4
SYS_DEVCON_SystemLock();
/* System Services Initialization */
SYS_INT_Initialize();
/* Initialize Drivers */
/* Timer Instanace 0 Call */
DRV_TMR0_Initialize();
/* Initialize System Services */
/* Initialize Middleware */
/* Enable Global Interrupts */
SYS_INT_Enable();
/* Initialize the Application */
APP_Initialize();
}
/*******************************************************************************
End of File
*/
//�ȉ��A system_interrupt.c
//-----------------------------------------------------------------------------------------------------------------------
/*******************************************************************************
System Interrupts File
File Name:
system_int.c
Summary:
Raw ISR definitions.
Description:
This file contains a definitions of the raw ISRs required to support the
interrupt sub-system.
Summary:
This file contains source code for the interrupt vector functions in the
system.
Description:
This file contains source code for the interrupt vector functions in the
system. It implements the system and part specific vector "stub" functions
from which the individual "Tasks" functions are called for any modules
executing interrupt-driven in the MPLAB Harmony system.
Remarks:
This file requires access to the systemObjects global data structure that
contains the object handles to all MPLAB Harmony module objects executing
interrupt-driven in the system. These handles are passed into the individual
module "Tasks" functions to identify the instance of the module to maintain.
*******************************************************************************/
// DOM-IGNORE-BEGIN
/*******************************************************************************
Copyright (c) 2011-2014 released Microchip Technology Inc. All rights reserved.
Microchip licenses to you the right to use, modify, copy and distribute
Software only when embedded on a Microchip microcontroller or digital signal
controller that is integrated into your product or third party product
(pursuant to the sublicense terms in the accompanying license agreement).
You should refer to the license agreement accompanying this Software for
additional information regarding your rights and obligations.
SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND,
EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF
MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE.
IN NO EVENT SHALL MICROCHIP OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER
CONTRACT, NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR
OTHER LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR
CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF
SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
*******************************************************************************/
// DOM-IGNORE-END
// *****************************************************************************
// *****************************************************************************
// Section: Included Files
// *****************************************************************************
// *****************************************************************************
#include <xc.h>
#include <sys/attribs.h>
#include "app.h"
#include "system_definitions.h"
# ifndef _MY_INCLUDE_PERIPHERAL
#define _MY_INCLUDE_PERIPHERAL
#include <peripheral/peripheral.h>
#include <peripheral/ports/plib_ports.h>
#endif
int Flag_Adc = 0; //AD�ϊ��t���O
// *****************************************************************************
// *****************************************************************************
// Section: System Interrupt Vector Functions
// *****************************************************************************
// *****************************************************************************
void __ISR(_TIMER_1_VECTOR, ipl2) _IntHandlerDrvTmrInstance0(void)
{
PLIB_INT_SourceFlagClear(INT_ID_0,INT_SOURCE_TIMER_1);//�^�C�}1���荞�݃t���O�N���A
//IFS0bits.T1IF= 0; //�^�C�}1���荞�݃t���O�N���A
PLIB_TMR_Period16BitSet(TMR_ID_1,9766); //5 nsec x20 x 9766 x 256 =250.0096msec = 250msec
Flag_Adc = 1;
}
/*******************************************************************************
End of File
*/
//�ȉ��A1lcd_lib_C32.h
//------------------------------------------------------------------------------------------------------------
//*************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.h
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u�����@1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//*************************************************************************
#include <p32xxxx.h>
#define lcd_Clock 200000000 // �P�ʂ�Hz�Ŏw��
// LCD�|�[�g�ݒ�
#define lcd_port_DB7 LATBbits.LATB15 //LCD��DB7�i14�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB6 LATBbits.LATB14 //LCD��DB6(13�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB5 LATBbits.LATB13 //��DB5(12�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_port_DB4 LATBbits.LATB12 //LCD��DB4�i11�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_rs LATAbits.LATA9 //LCD��rs�i4�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
#define lcd_stb LATAbits.LATA10 //LCD��stb�i6�ԃs��)�ɐڑ������PIC���|�[�g�ԍ��ݒ�
void lcd_out(char code, char flag);
void lcd_data(char asci);
void lcd_cmd(char cmd);
void lcd_clear(void);
void lcd_init(void);
void lcd_str(char *str);
//�ȉ��A1lcd_lib_C32.c
//----------------------------------------------------------------------------------------------------------------------
//**************************************************************************
//�C���N���[�h�t�@�C�� 1lcd_lib_C32.c
//���̃t�@�C���͌�ՓN�炳�v���ꂽCCS�R���p�C���p�t���\�����C�u���� 1lcd_lib.c�����ƂɁA
//C32�R���p�C���Ή����ŕύX�������̂ł��B
//**************************************************************************
///////////////////////////////////////////////
// �t���\���퐧�䃉�C�u�����@for C32�R���p�C���[
// �������͈ȉ�
//�@�@�@�@lcd_init() ----- ������
// lcd_cmd(cmd) ----- �R�}���h�o��
// lcd_data(chr) ----- �P�����\���o��
// lcd_clear() ----- �S����
//�@�@�@�@lcd_str(str*) -----�@������\��
//////////////////////////////////////////////
#include "1lcd_lib_C32.h"
void lcd_delay_us(unsigned int usec) //1��sec�x����
{
int count;
count = (int)(lcd_Clock/20000000)*usec;
do //�����F�@at�@200MH (Clock=200000000)
{ //delay_us(1000)��1000.4��sec�A�@delay_us(100)��100.6��sec�Adelay_us(10)��10.5��sec�Adelay_us(1)��1.5��sec
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");asm("NOP");
asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP"); asm("NOP");
count--;
}while(count != 0);
}
void lcd_delay_ms(unsigned int msec) //1msec�x����
{
unsigned int i;
for(i=0; i<msec; i++)
lcd_delay_us(1000);
}
//////// �f�[�^�o�̓T�u��
void lcd_out(char code, char flag)
{
if(code & 0b10000000)lcd_port_DB7 = 1; //LCD��DB7�ւ̏o�̓Z�b�g
else lcd_port_DB7 = 0;
if(code & 0b01000000)lcd_port_DB6 = 1; //LCD��DB6�ւ̏o�̓Z�b�g
else lcd_port_DB6 = 0;
if(code & 0b00100000)lcd_port_DB5 = 1; //LCD��DB5�ւ̏o�̓Z�b�g
else lcd_port_DB5 = 0;
if(code & 0b00010000)lcd_port_DB4 = 1; //LCD��DB�S�ւ̏o�̓Z�b�g
else lcd_port_DB4 = 0;
if (flag == 0)
lcd_rs = 1; // �\���f�[�^�̏ꍇ
else
lcd_rs = 0; // �R�}���h�f�[�^�̏ꍇ
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); //1��sec�E�F�C�g
lcd_stb = 1; // strobe(E) ON�@�iEnable�j
lcd_delay_us(3); //1��sec�E�F�C�g
// lcd_delay_us(1); // 1��sec �F strobe�M���̕�
lcd_stb = 0; // reset strobe
}
//////// �P�����\����
void lcd_data(char asci)
{
lcd_out(asci, 0); // ��ʂS�r�b�g�o��
lcd_out(asci<<4, 0); // ���ʂS�r�b�g�o��
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �R�}���h�o�͊�
void lcd_cmd(char cmd)
{
lcd_out(cmd, 1); // ��ʂS�r�b�g�o��
lcd_out(cmd<<4, 1); // ���ʂS�r�b�g�o��
if((cmd & 0x03) != 0) // clear Home�̏ꍇ
lcd_delay_ms(2); // 2msec�҂�
else
lcd_delay_us(50); //50��sec�E�F�C�g
}
/////// �S������
void lcd_clear(void)
{
lcd_cmd(0x01); // �������R�}���h�o��
}
/////// ������o�͊�
void lcd_str(char* str)
{
while(*str) //������I�[�� '\0'�����o����܂�
{
lcd_data(*str); //�@�P�����\��
str++; //�|�C���^���C���N�������g
}
}
/////// ��������
void lcd_init(void)
{
lcd_delay_ms(20); //20msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(5); //5msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x30, 1); // 8bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_out(0x20, 1); // 4bit mode set
lcd_delay_ms(1); //1msec�E�F�C�g
lcd_cmd(0x2E); // DL=0 4bit mode
lcd_cmd(0x08); // display off C=D=B=0
lcd_cmd(0x0D); // display on C=D=1 B=0
lcd_cmd(0x06); // entry I/D=1 S=0
lcd_cmd(0x02); // cursor home
}
�@
�����쌋�ʁ�
| �@�@�@�@�@�@�@�@�@AD���͓d���@�@�@�@�@�@�@�@ |
�t����i�F�@AD�R���o�[�^�Ǎ������l
�t�����i�F�@�d�����Z�l
�e�X�^�[�\���F�@�d���l[V] |
| Vin = 0v |
 |
| Vin = 1v |
 |
| Vin = 2v |
 |
| Vin = 3v |
 |
| Vin = 3.3v |
 |
�@�@�@�@�@